To choose the sampling time, we consider the time scales of all signals and systems in our closed-loop sampled-data system:
- Plant bandwidth
- Sampling frequency
- Frequency of reference and/or disturbance and/or settling time ()
Taking these into account, we have some options:
- Choose small enough. Rule of thumb: .
- Add continuous-time low pass filter
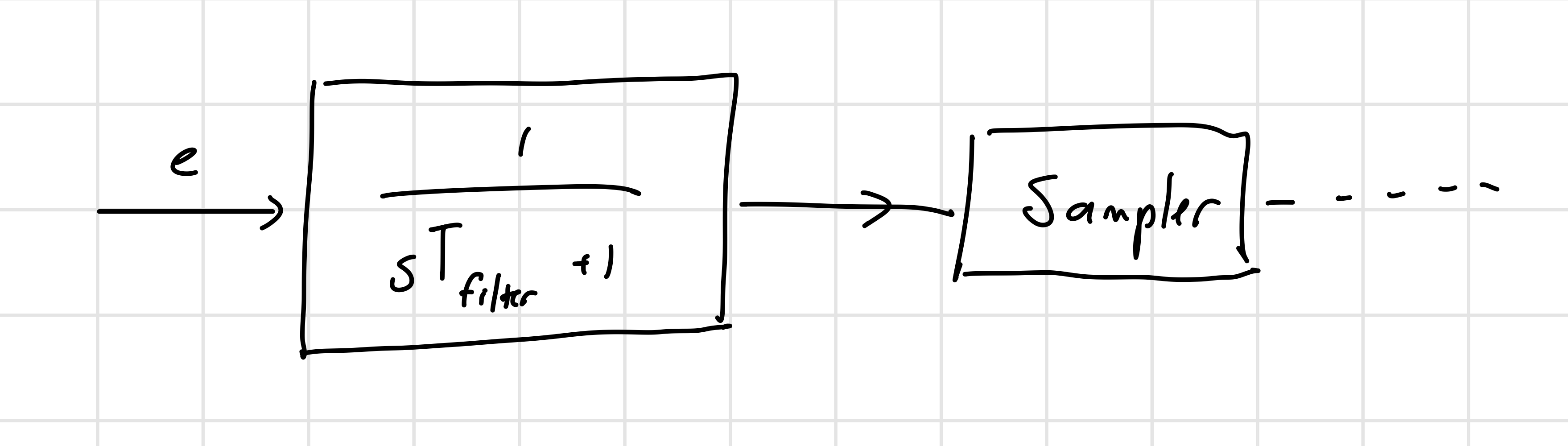 The idea is to filter out the high frequency signals to avoid aliasing
The idea is to filter out the high frequency signals to avoid aliasing
Plant bandwidth
At high enough frequencies, the gains of all (physical) plants approach zero. At some point, if input is high enough frequency, you simply can’t respond fast enough. serves as an estimate for the fastest time scales for the plant.
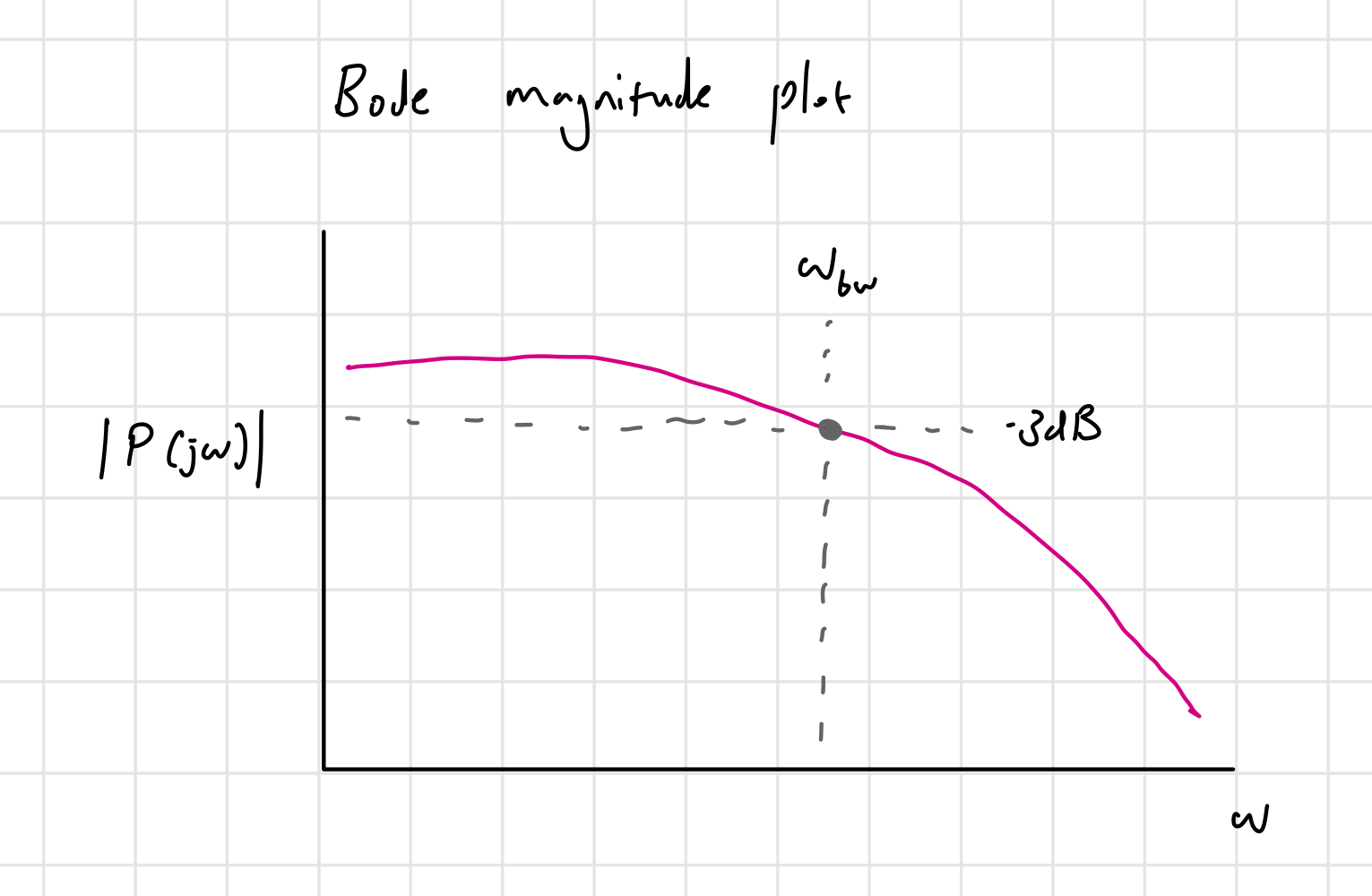
Two ways to find :
- Find where
-
- For example, would have .
Sampling frequency
Sampling frequency . We desire the sampling frequency to be high such that .
- This means that we want a small sampling time . However, this typically requires more expensive hardware, and may not even be feasible due to hardware limitations.
- If we sample too fast, there might not be time for computing new control actions.
- We might also reach the limits of our numerical precision
Frequency of reference/disturbance/settling time
Frequency of reference and/or disturbance and/or settling time ():
- Ex.
- Ex.