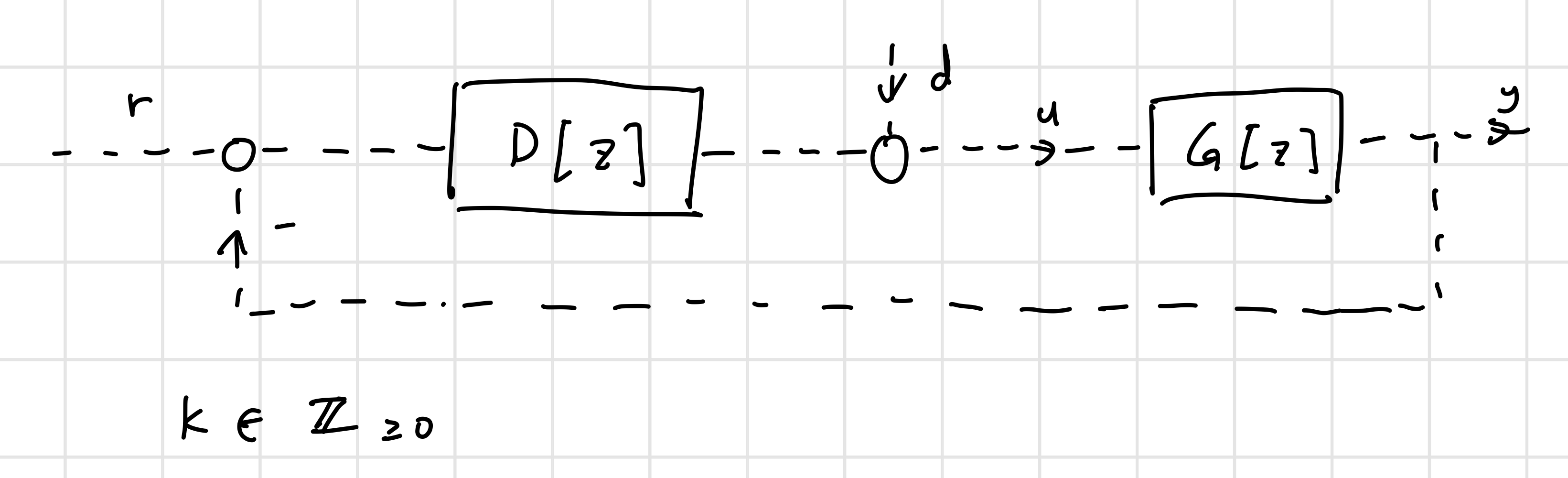
A discrete-time control system has the form:
A typical step response for a discrete control system:
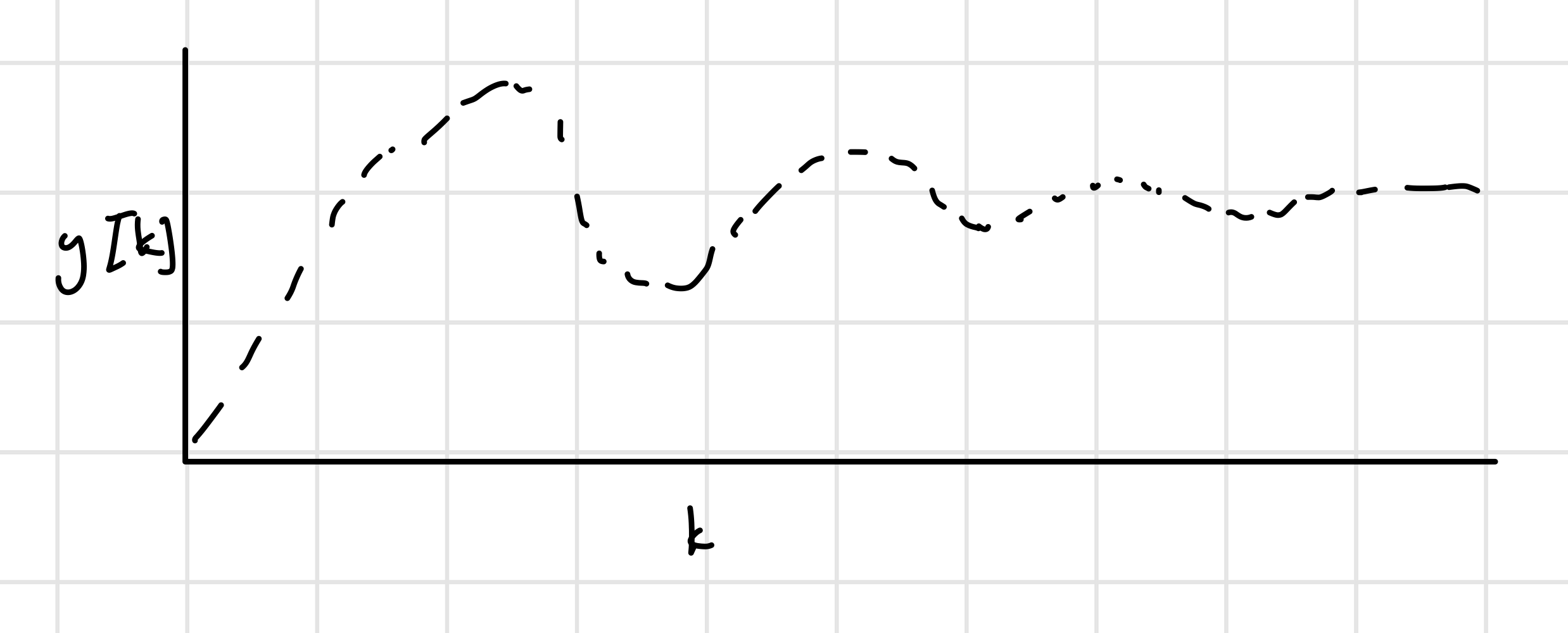
(some overshoot, oscillate, and then become stable)
Time vs. Frequency domain:
- Time domain: Difference equations → lead to state-space models
- Frequency () domain: Transfer function models
Our focus will be on LTI systems. Note that each of the above has different tools for stability analysis and control design.
Because physical plants are always continuous-time systems, discrete-time control systems are in fact NOT digital control systems!