Given some controller parameter , how can we use a Nyquist plot to determine what values of will result in a closed-loop stable system?
Consider the following example:
To plot we use Nyquist(L):
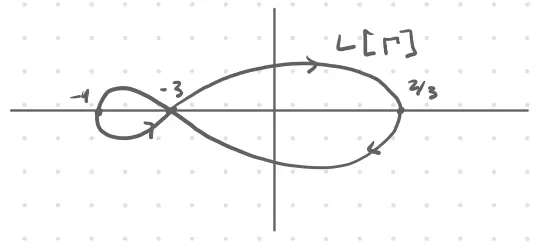
This tells us that with , we have encirclements of the origin. The system one unstable open-loop pole (). Thus, since , the system is not closed-loop stable.
Now, if we vary , where can we find closed-loop stability?
Recall that . Via the Argument Principle, We said:
- when we change , we don’t have to change the Nyquist plot, just the point around which we count encirclements!
Assume . To find when the system is stable, we find valid regions on the real axis, which are bounded by points where the Nyquist plot intersects with the real axis.

| Region | N |
|---|---|
| A | 0 |
| B | 1 |
| C | -1 |
| 0 | 0 |
We get closed-loop stability when is equal to the number of unstable open-loop poles (1 in this example). Thus, we get stability when falls in region , such that:
Thus, the system is stable for . Note that the Nyquist plot is inconclusive on the boundary points.