The PID controller is a classic controller where we combine proportional feedback and derivative feedback with an integral feedback term. This results in feedback of the form:
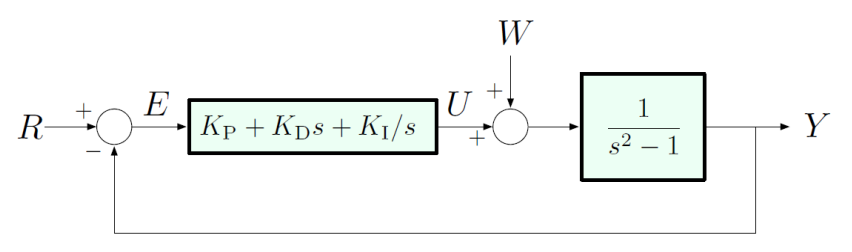
We can write:
where is the error between the reference input and the system output.
We have:
Thus, we can write the transfer function as:
Stability
Based on the transfer function, recall that a necessary (but not sufficient) condition is that the coefficients of the polynomial need to be positive, which means we need:
We also need (Routh-Hurwitz Criterion for 3rd-order).
Note that we can assign coefficients arbitrarily by choosing .
Reference Tracking
The DC gain of the transfer function between the reference input and output can be calculated as
So, with the addition of integral feedback we remove the limitation of PD control and achieve perfect tracking.
Disturbance Rejection
The DC gain of the transfer function between the disturbance input and output can be calculated as
So, integral gain also gives complete attenuation of constant disturbances!