Instead of simple Proportional Feedback, what if we use the derivative of the error, multiplied by some gain, as feedback?
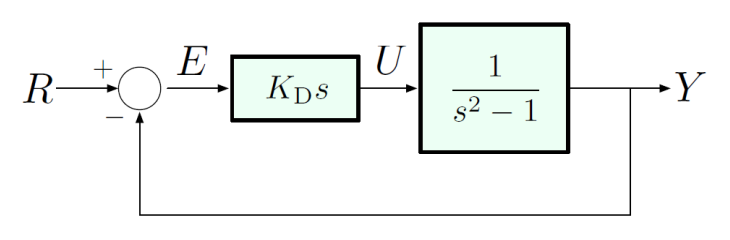
The motivation behind this is that since the derivative represents the rate of change, a faster rate of change means that more correction/control is needed.
The transfer function for this is
This is still not stable because the denominator has a negative coefficient. The transfer function also has a zero at the origin, which is generally undesirable.