We saw that simply using proportional feedback affected the coefficient of the constant term, and using derivative feedback affected the coefficient of . What if we combine them?
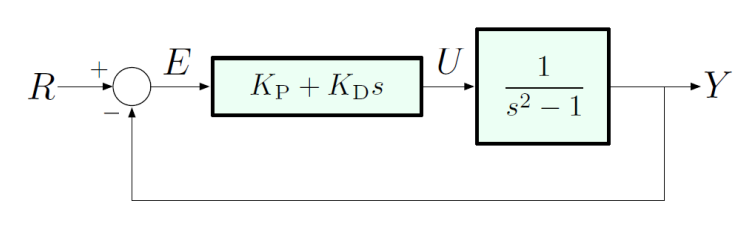
The transfer function is:
Now, if we set and , then the transfer function will be stable. Furthermore, by choosing and , we can arbitrarily assign coefficients of the denominator, therefore the poles of the transfer function. Thus, PD control gives us arbitrary pole placement.
Also note that the addition of the P-gain moves the zero (solution to numerator term):
where the LHP zero at .
But what’s missing?
Thus, with PD control, we can’t have perfect tracking of constant reference. PID control addresses.