A potential problem for PID control is integral windup.
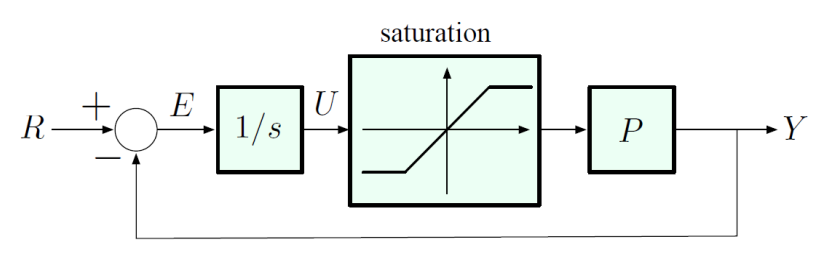
When the actuator that follows your control signal has a maximum and minimum limit (saturates), and our signal asks for too big/small of a signal, the actual output is clipped. However, our PID controller has an integrator, which accumulates error over time; however, when the actuator is saturated, even if the error is decreasing, the integrator keeps adding up the past error.
We say that the integrator “winds up”; the error may be small, but its integrated past history builds up. There are various anti-windup schemes to deal with this; essentially, we try to detect the onset of saturation and turn the integrator off.