The fact that adding an integrator term to a PD controller leads to perfect tracking of constant references and perfect rejection of constant disturbances is a special case of a more general analysis.
Consider the reference
- would give us a step (position)
- would give us a ramp (velocity)
- would give us a parabola (acceleration)
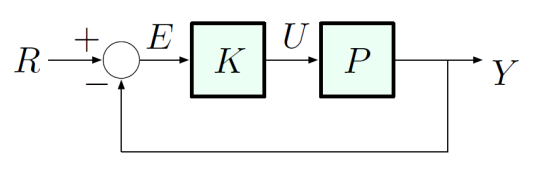
he error signal is given by:
The Final Value Theorem (assuming stability) gives
System Type
The system type is the number of poles the forward-loop transfer function has at the origin (). It is the degree of the lowest-degree polynomial that cannot be tracked in feedback with zero steady-state error.
- Note that the system type is calculated from the forward-loop transfer function, although the conclusions drawn are about the closed-loop system.
Let’s suppose that has an -th order pole at :
Then:
Recall that the reference is a polynomial of degree . There are three cases to consider:
- Perfect tracking:
- Imperfect tracking: gives imperfect tracking
- No tracking:
Examples
- Type 0: No pole at origin. This is what we had without the integral gain term: nonzero steady-state error to constant references.
- Type 1: A single pole at the origin. This is what we get with an integral gain term: we can track constant references and reject constant disturbances with zero error. However, we can’t track higher order references like ramp signals.
- Type 2: A double pole at the origin. Can track ramp references without error, but not , etc.