g[k]=Z−1(G[z])=Z−1(G[∞]+i=1∑nj=1∑ni(z−pi)jci,j)=G[∞]Z−1(1)+i=1∑nj=1∑nici,jZ−1((z−pi)j1)=G[∞]δ[k]+i=1∑ni=1∑nici,j(j−1k−1)pik−j[def of impulse response][partial frac. deocmposition][Lineary of Z−1][Known Z−1]
where
δ[k]={1,0k=1otherwise
So, given that G[z] is real, rational, and proper, we can write
g[k]=G[∞]δ[k]+i=1∑ni=1∑nici,j(j−1k−1)pik−j[expression from class]
They key reason this works is that all the poles are inside the open unit disk, except for the one at z=1.
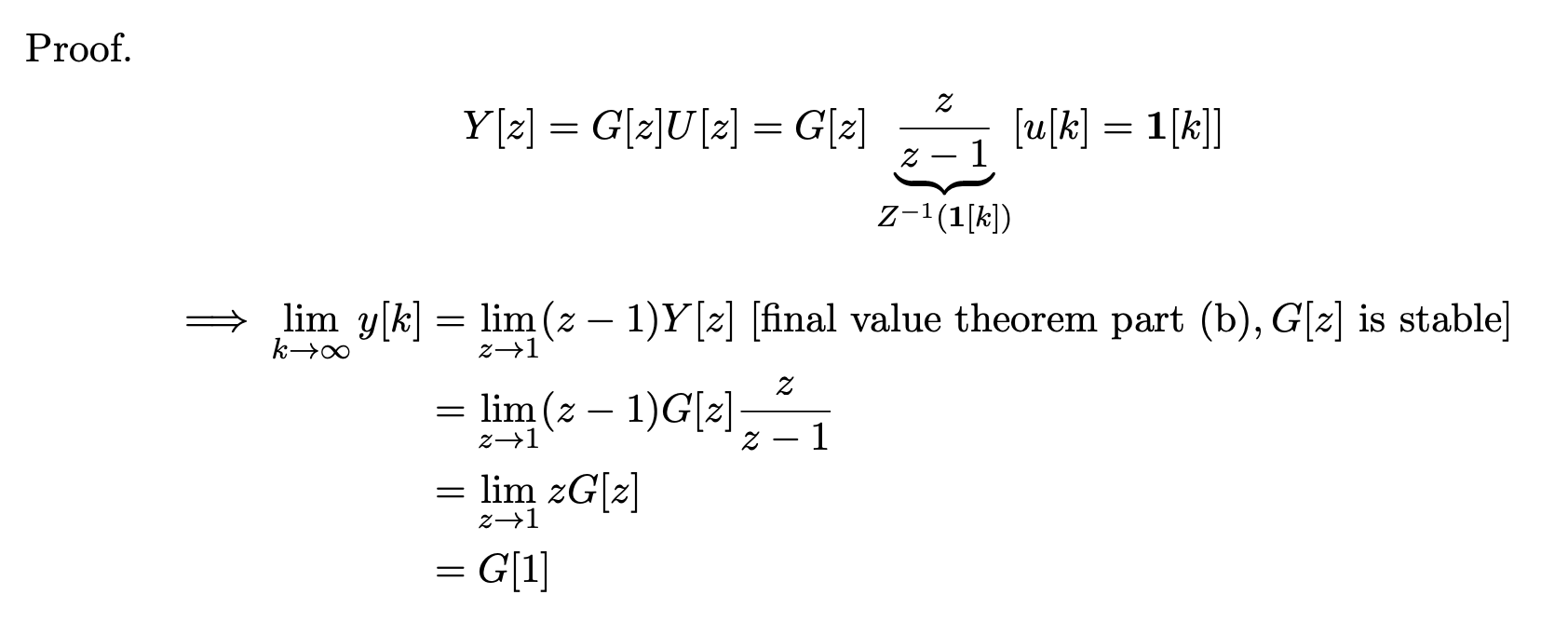
FVT for Step Response
Let G[z]/P(s) be a real, rational, proper, and stable transfer function. Let u[k]=1[k]/u(t)=1(t) be the input to G[z]/P(s), and let y[k]/y(t) be its output. Then the step response is:
k→∞limy[k]t→∞limy(t)=G[1]=G(1)
ELEC 3200
The Final Value Theorem in control states that if all poles of sY(s) are strictly stable or lie in the open left half-plane, i.e., have Re(s)<0, then
y(∞)=s→∞limsY(s)
The more general mathematical form of the theorem states that if limt→∞f(t) exists (it has a finite limit), then
t→∞limf(t)=s→0limsF(s)
where F(s) is the one-sided Laplace transform of f(t).