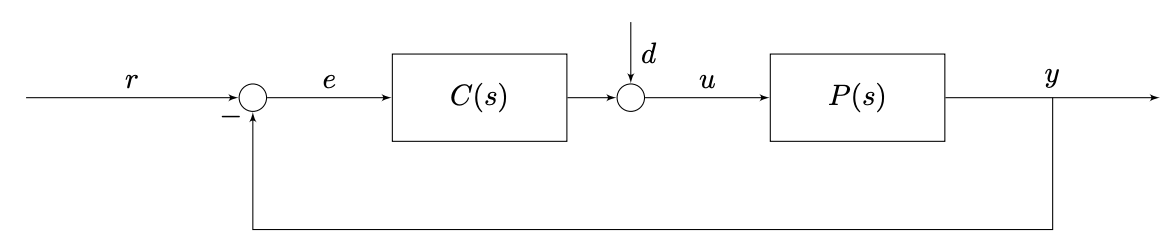
Two strategies of control design in DT:
- Direct design of in DT, such as IOP with SPA
- Transient specs will be satisfied at the end of the sample points
- Closed-loop stability at the sample points
- Emulation design: Design in CT, and then approximate with in DT
This is done through this series of steps. First, starting from the frequency domain , we use state space realization to switch to the time domain:
We then use a approximation
We then take the -transform to get to .
Our approximation will inevitably have some impact on the poles as we go from CT to DT.
Approximating C(s) into D[z]
Our plan is to make an approximation in the time domain, then go back to the frequency domain.
Assume we have a continuous time system of the form:
We use a running assumption that has only simple poles:
Note that if we assume , we also have
which gives
Recall that we can write
We can use the left-side rule for numerical integration:
Taking the -transform gives
We can write the term as
such that we have
We want to find the transfer function from to :
where the just makes you sum all the entries in the column vector.
Thus, we have
Therefore, to get this particular approximation, we use
Instead of using the left-side rule, we can take the same approach with other numerical integration methods:
With the right side rule :
With the trapezoidal rule:
Impact on Poles
Our approximation will inevitably have some impact on our poles as we go from CT to DT. Ideally, we will get stable poles in CT stable poles in DT.
As an example, consider this DT :
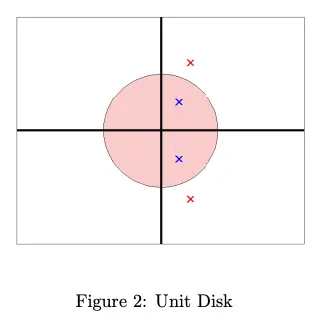
Using the left side rule with :
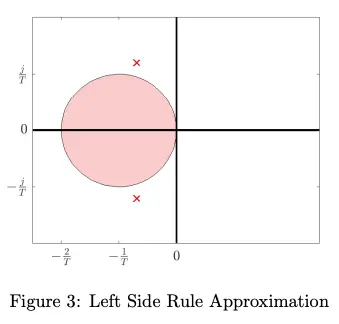
Note the location of the red poles between Figure 2 and Figure 3. Thus, for the left side rule, stable poles in CT may result in unstable poles in DT.
With the right side rule approximation :
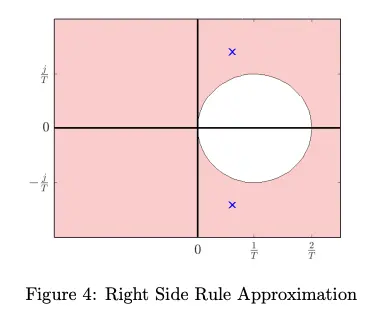
Note the location of the blue poles between Figure 2 and Figure 4. Thus, for the right side rule, unstable poles in CT may result in stable poles poles in DT.
With the trapezoidal rule :
Thus, for the trapezoidal rule, stable poles in CT map to stable poles in DT.
Trapezoidal approximation with a system that is closed-loop stable with does not guarantee CL stability for the sampled-data system with . Stability of does not tell us anything about closed-loop stability. This is one of the downsides of emulation design.
Step Invariant Approximation
Step invariant approximation is an emulation design method that ensures the step responses of and agree at sample points:
This is the default of c2d in MATLAB.