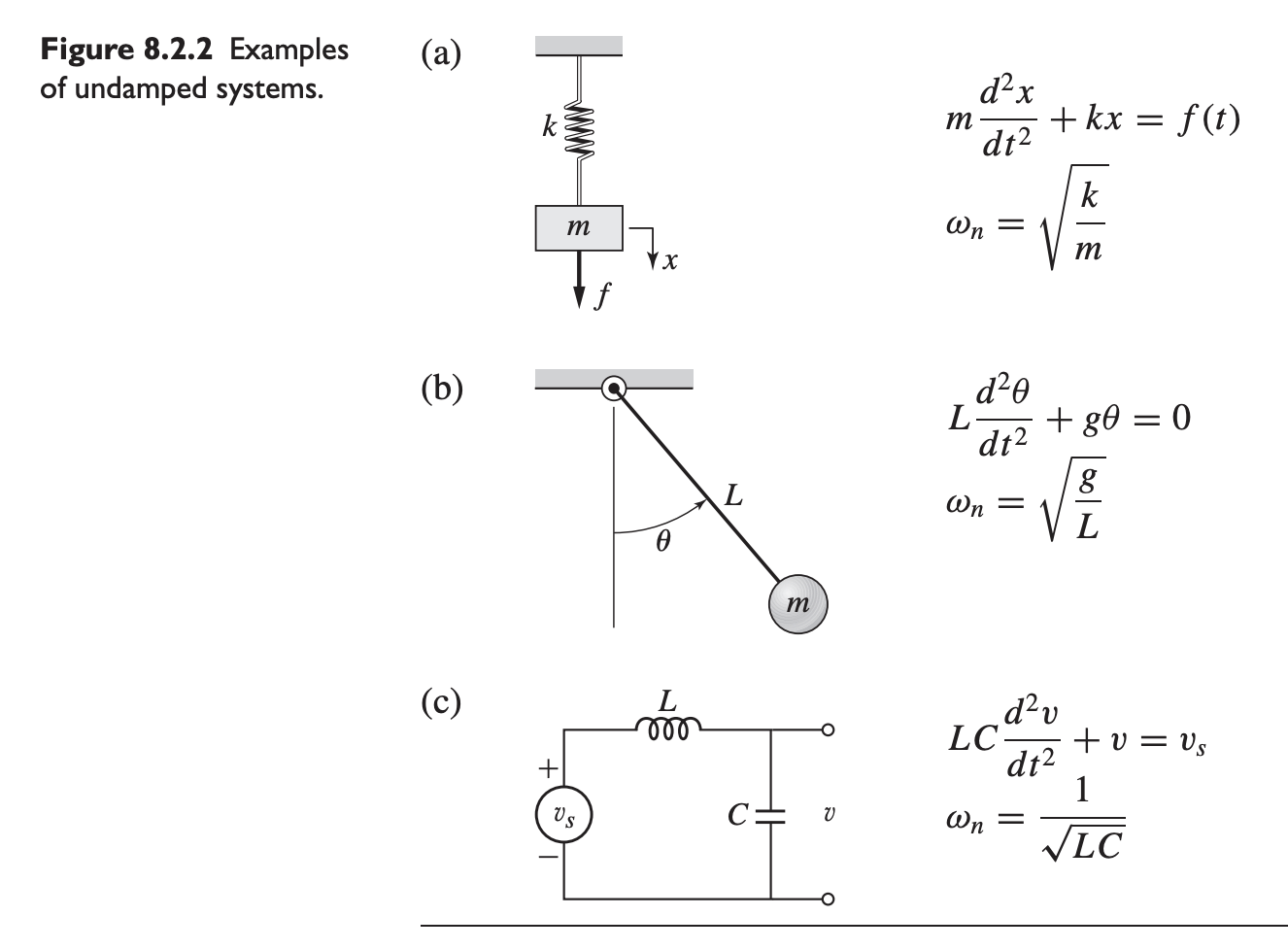
Consider the undamped systems shown below. They all have the same model form: . We can consider this to be the same as the general second-order system above but with .
We established that for second-order systems, we have
With , this becomes:
For the free response (ZIR) case of :
And the transfer function is:
where is the characteristic equation.
What if we solve the characteristic equation? We have
where is the natural frequency of the undamped system. Then, we can write:
Recall that:
Thus, we have:
This solution shows that the mass oscillates about the rest position with a frequency of . The period of the oscillation is .
So we have some shit like
We assume that . Then:
so we have
So we want to solve . We have in the form of
So we have:
The real part governs the amplitude so if the function explodes, if it’s stable. And this is why the time constant because this tells us how it decays.
The imaginary one is a sinusoid like
Given:
We have:
- If , the system is unstable (increases over time) so and are undefined.
- If the roots are real and equal, (eg. or something), and are not defined because there’s no oscillation.
- If there is only one root, the system is first order, so damping is not defined, and and are not defined because there’s no oscillation.