For a damped system, we have
Like the undamped case, we aim to solve the characteristic equation to determine the response of the system. We have
Recall that , so . Let:
We can then say:
and
where is called the damping ratio. Then, we have
Recall that in general, for second-order systems we have:
The free damped response, where , would then be
The poles are at
There are three cases we need to consider.
Case 1: Overdamped
This occurs when (or equivalently ). We have
If we have , that means have have .
Since , we have , which means that produces two distinct real poles. Thus, we have
Simplifying:
where or .
This gives:
Converting back to time domain:
If we let and , this can be written as
Note that since , we call the dominant pole.
Overdamped Example
Let’s say we have have:
- Then, we have:
So:
where and
Case 2: Critically Damped
In the critically damped cause , or , such that . This is the minimum damping to have no oscillation.
In this case, we have , so , so we have repeated real poles, . Thus, we have:
This gives:
Case 3: Underdamped
For the underdamped case, we have , such that or . Then, we have
where
Thus, we have
where is the damped natural frequency. Then, we can write as
and
This damped oscillation plot looks something like:
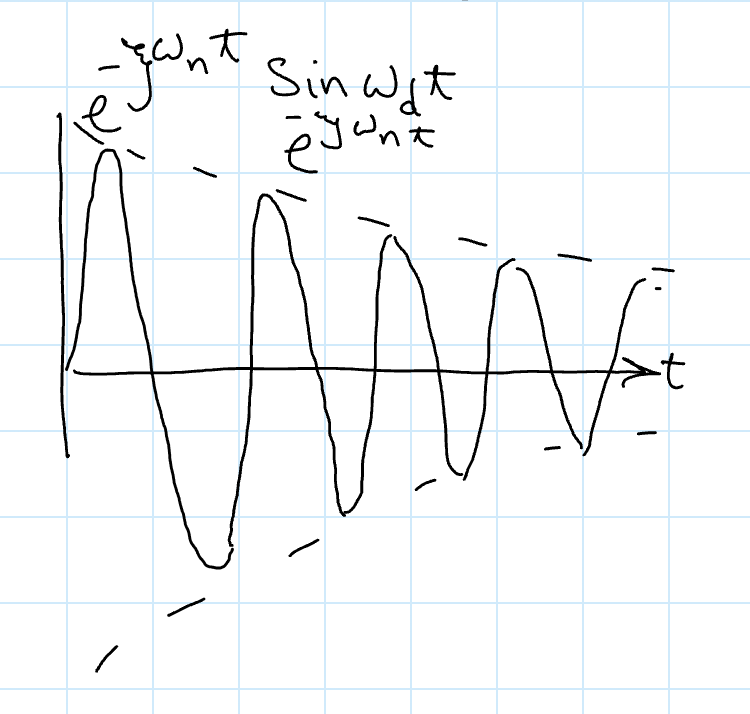
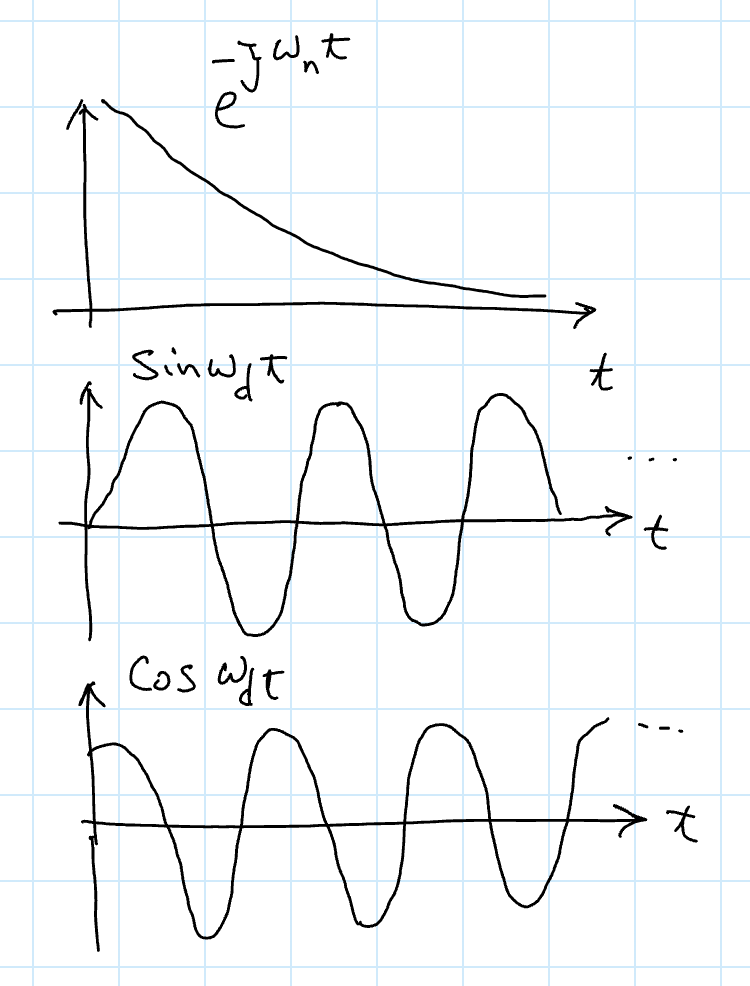
Essentially, the amplitude of oscillation follows .
For underdamped systems, the time constant is
so we have:
In the time domain, this can be written as
Alternatively, we can write
such that
and
Graphical Interpretation
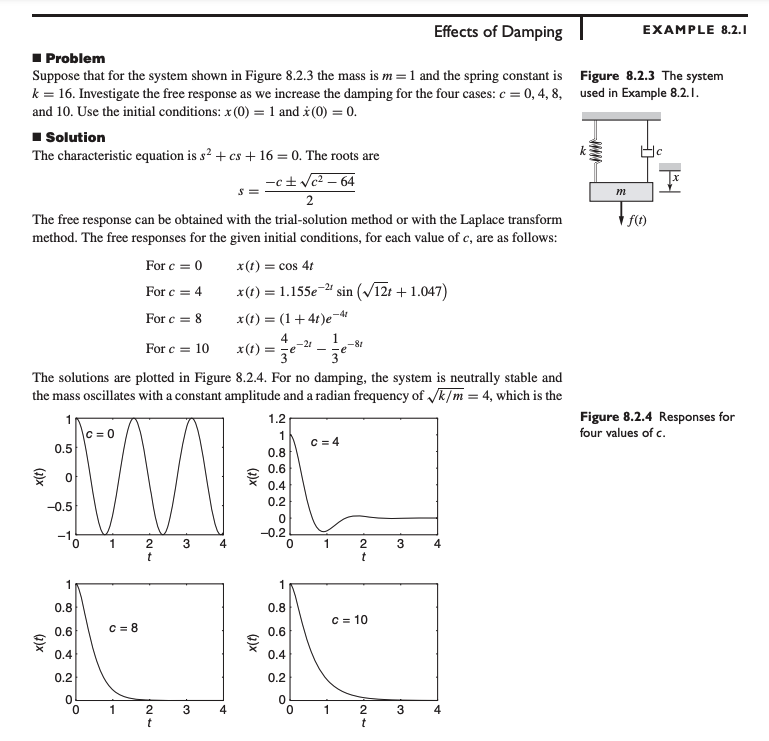
Effects of Damping
With , oscillation will occur. This is illustrated in the example problem below.
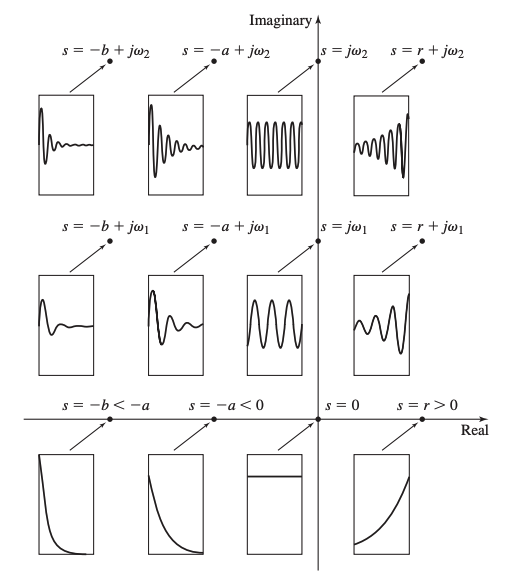
Effect of Root Location
In finding the roots of the characteristic equation in the complex plane, the location of the roots affects the free response. The real part of the root is plotted on the horizontal axis, and the imaginary part is plotted on the vertical axis. Because the roots are conjugates of each other, we only show the upper root.
- Unstable behavior occurs if any root lies to the right of the imaginary axis.
- The response oscillates only when a root has a nonzero imaginary part.
- The greater the imaginary part, the higher the frequency of oscillation.
- The farther to the left the root lies, the faster the response due to that root decays.