Inertial Sensors and Position Sensors are mostly used to understand egomotion – where am I and what is my posture?
In mobile robots, these are mostly used odometry:
- Sensors for relative motion data: Accelerometers, gyroscopes, encoders
- Sensors for absolute motion data: Magnetometers, motion capture, GPS
Wheel odometry example
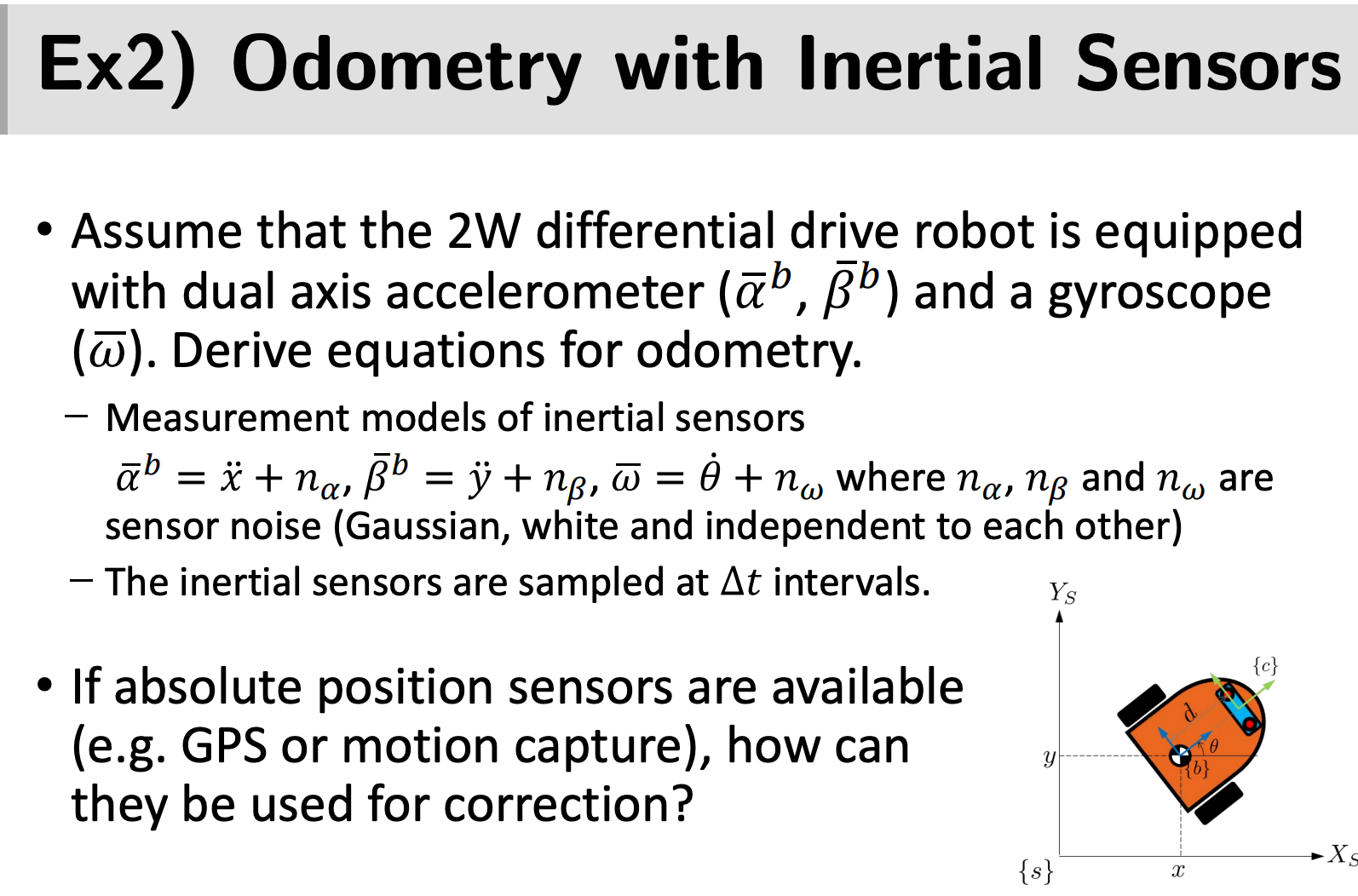
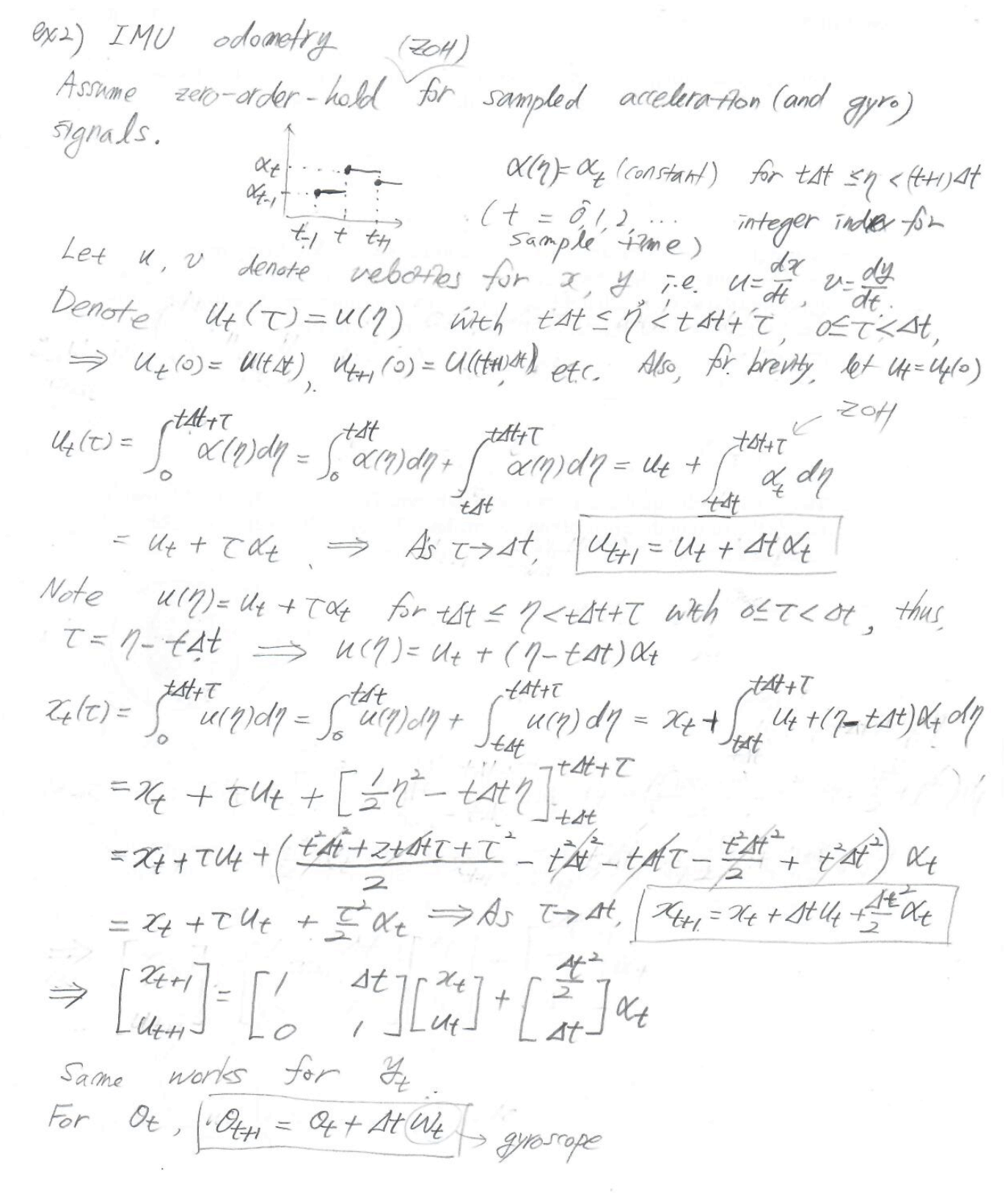
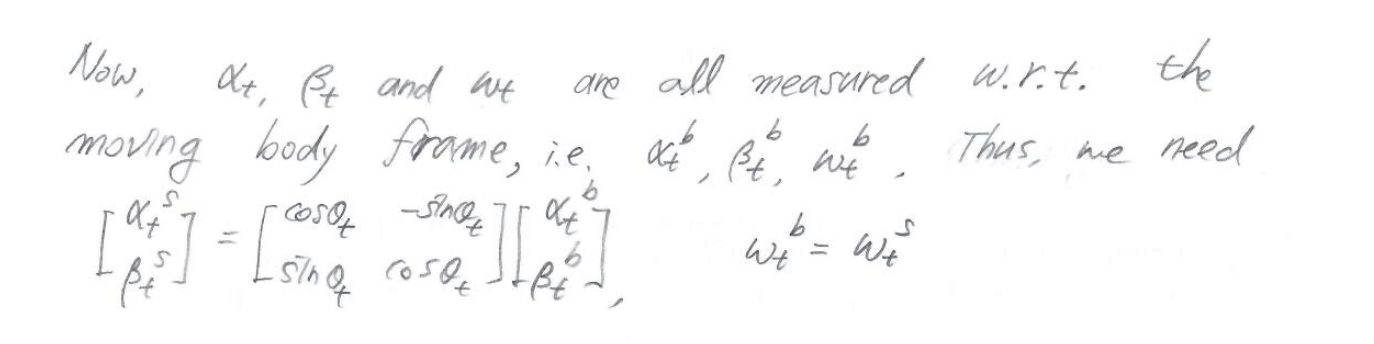
Inertial odometry example