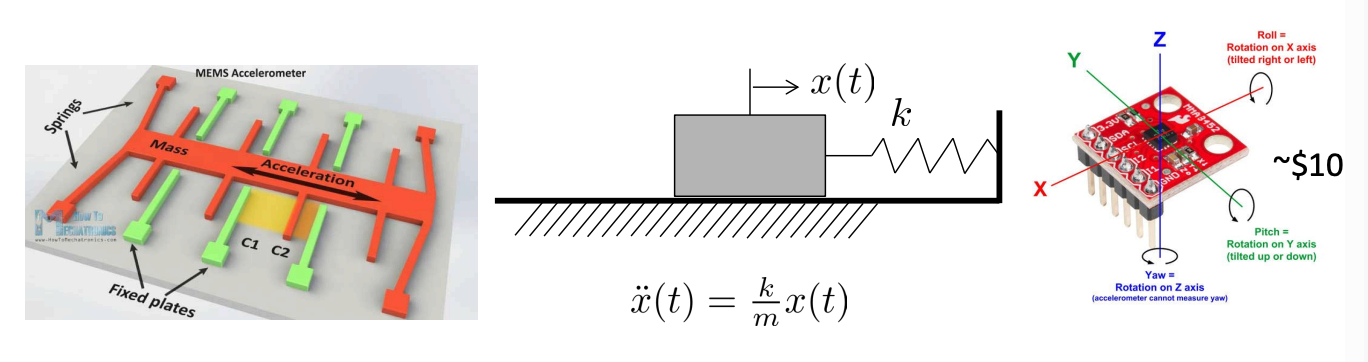
Accelerometers
MEMS accelerometers rule the market. Structurally, it’s a miniature mass-spring system; the main sensor computes translation velocities and positions. Also widely used for tilt sengin (by measuring gravity).
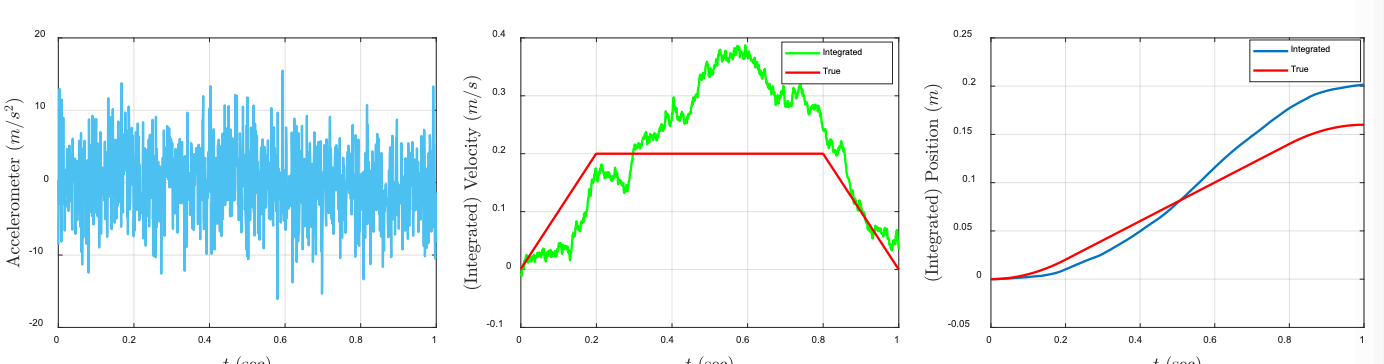
Properties of accelerometer signals:
- Signals are always very noisy (Gaussian white noise)
- Numerical integration smoothens the noise (but with drift)
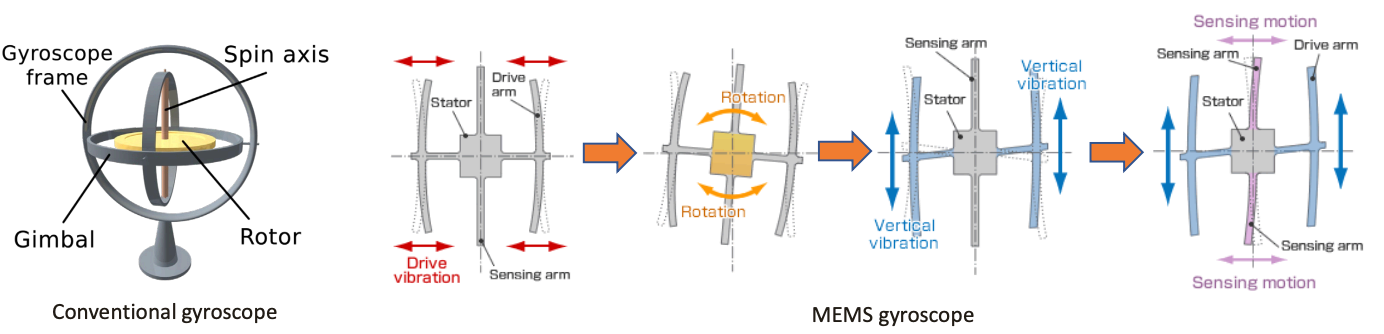
Gyroscopes
Like MEMS accelerometers, MEMS gyroscopes are prevalent. Conventional (macro scale) gyroscopes used a rotating body, which creates perpendicular (gyroscopic) when steered. MEMS gyros use a vibrating structure, which creates Coriolis force. These are also very noisy; integration provides us with rotation angle.
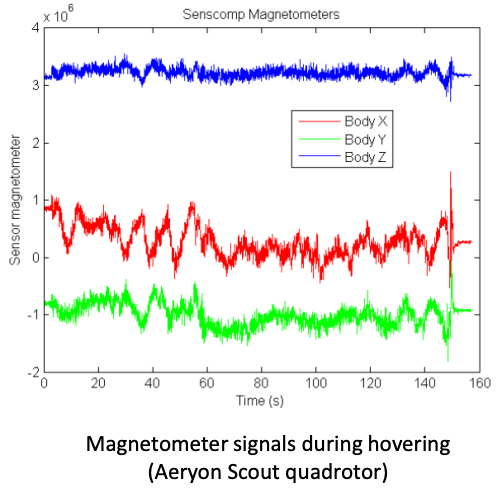
Magnetometer
Magnetometers measure the magnetic dipole of the earth. Basically, it consists of a 3 miniaturized compasses for 3 coordinates, measuring 3 DOF absolute orientation. Magnetometers provide important data to correct the drift from integration of accelerometers and gyroscopes; they may not be effective for indoors.
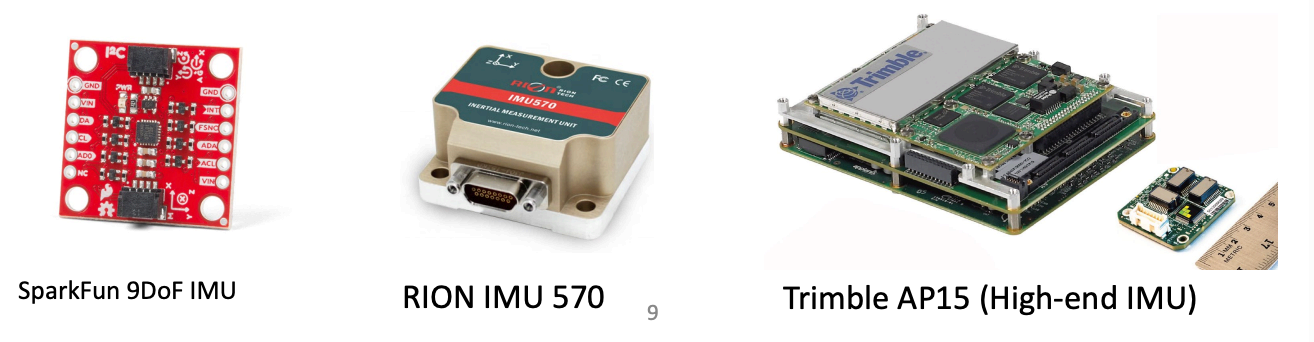
IMU
IMUs are a multi-axis combination of precision accelerometer, gyroscopes and magnetometers (9DOF). They often include a computer with filtering algorithms, applying a Kalman Filter to 6DOF rigid body motion model. The Kalman filter works by prediction followed by correction; accelerometer/gyroscope data is numerically integrated to make prediction of 6DOF, then the drifting error is corrected by the 3DOF magnetometer signals.