Recall that the IOP equations are:
Then, we can write a simple pole approximation of as:
We can also write a plant with simple poles as:
where we split its poles into stable and unstable components and .
With that setting, we can write as partial fraction decomposition
We can then write the first IOP equation as:
The second IOP equation can in turn be written as:
With this formulation, we can also define Specs for Control Design.
Vector Form
Define
where is the coefficients in our SPA form of , and similarly are the coefficients in
Define
where the diagonal terms are and everything else is .
Define
and
As an example, if we had :
Now we can re-express our IOP equations in terms of these vectors and matrices. Notice that are all constants. The only variables are . Re-arranging our above equations:
Converting to matrix form:
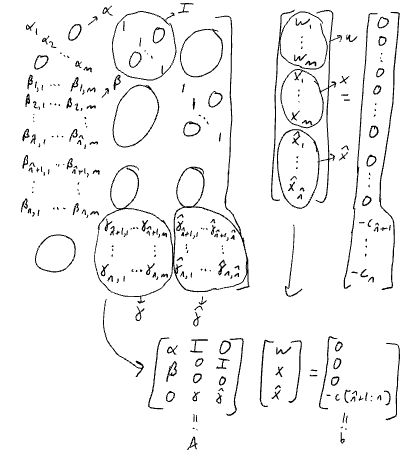
So we have:
Note that:
- is the number of plant poles
- is the number of stable plant poles
- is the number of approximating poles
A solution exists if is full rank and :
So the number of approximating poles must be at least twice the number of unstable plant poles to guarantee a solution exists.