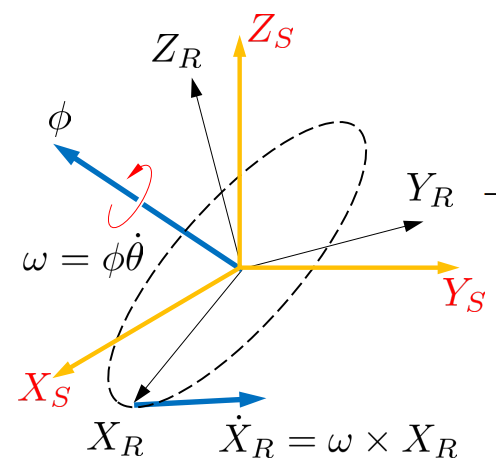
Consider a frame rotating with a fixed frame . For rotational axis and angle , we have
Noting the relation between and as , we can see , the first column of , is the coordinates of the unit vector on written with respect to , and so are and for and , respectively.
Hence, we have
And thus:
where
We call , the Lie Algebra of .