It’s hard to find analytic formulas to evaluate the performance of high-order systems. Additional poles and zeroes far from the imaginary axis will have little impact on the settling time and other performance specifications. Good low-order approximations of a high-order system can be found by appropriately neglecting the less significant poles and zeros.
Time-Domain Response from Pole-Zero Plots
We can use pole-zero plots to help determine time-domain response of a system. The location of system poles determines the nature of the system’s response:
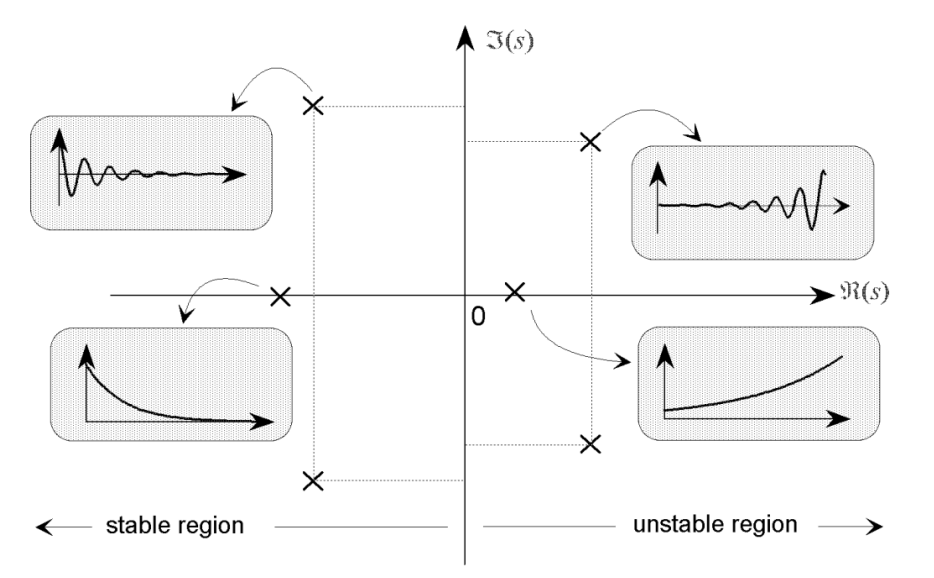
- Left-half plane () – Stable region
- Real poles far from the left are fast-decaying exponentials
- Real poles near origin are slow-decaying exponentials
- Complex conjugate poles: Damped oscillations
- Right-half plane () – Unstable region
- Real poles: Exponentially growing responses
- Complex conjugate poles: Damped oscillations
Example
What’s the expected form of the response of a system with a pole-zero plot shown in the following Figure?
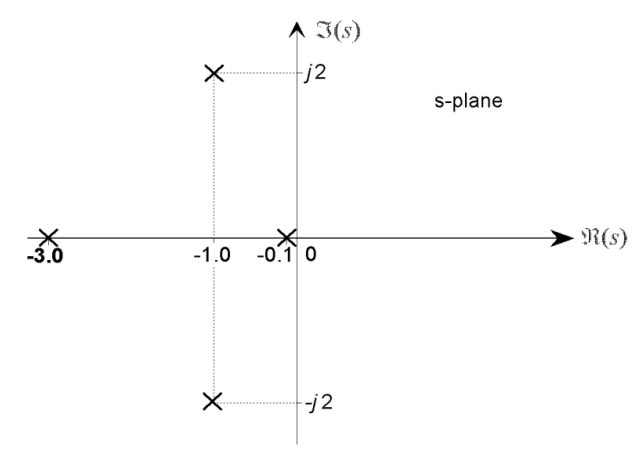
The system has four poles and no zeros. The two real poles correspond to decaying exponential terms and , and the complex conjugate pole pair introduces an oscillatory component. , so that the total homogeneous response is:
- The term decays rapidly
- The term decays slowly. It is therefore the dominant long term response component in the overall homogeneous response.
For methods of approximation, see: