We can define dominant and non-dominant poles/zeros based on their locaiton in the complex -plane:
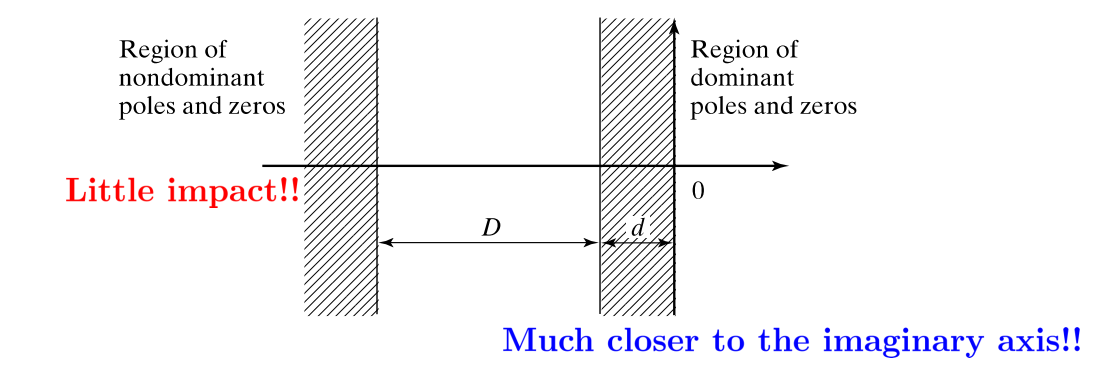
Dominant poles/zeros are closer to the imaginary axis, meaning they decay slowly and strongly influence the system’s long-term behavior.
Nondominant poles/zeros are further left (larger negative real part), so they decay quickly and have little on long-term dynamics.
Typically constitutes a dominant vs. imaginary poles.
Examples
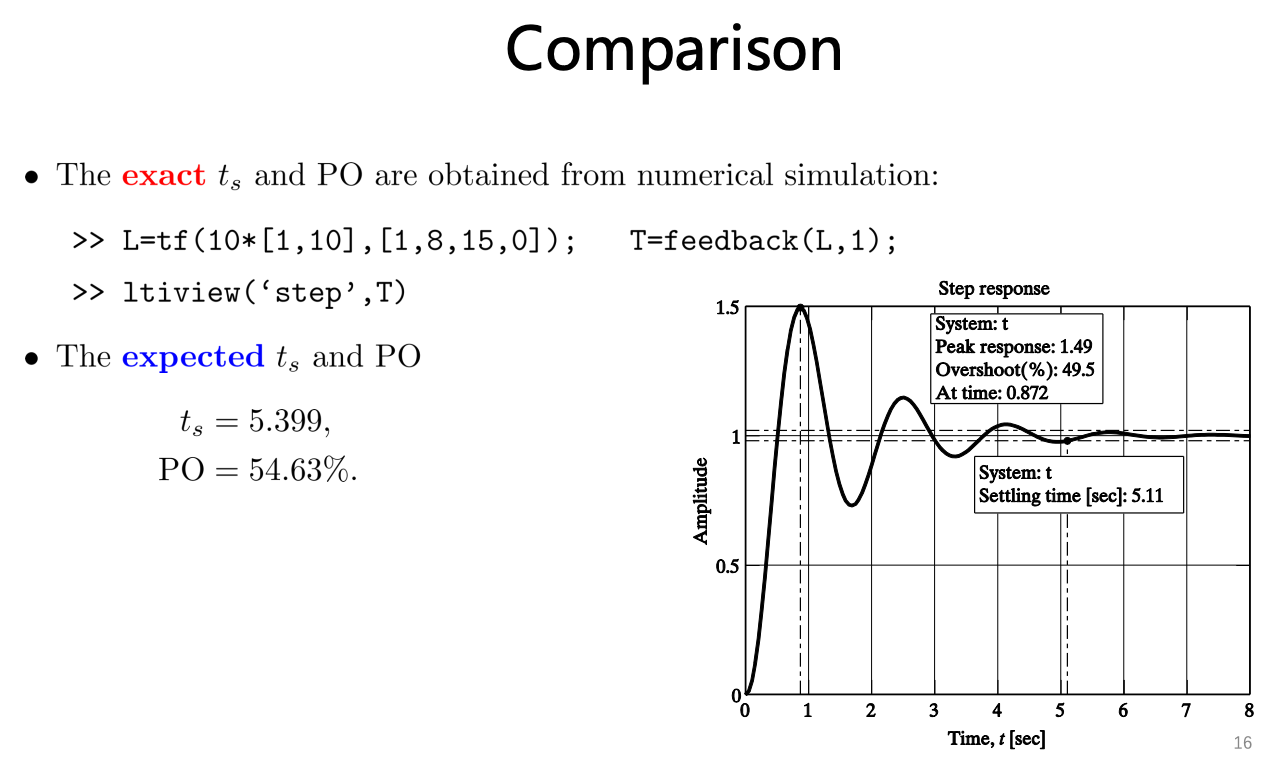
A unity feedback system with the loop transfer function:
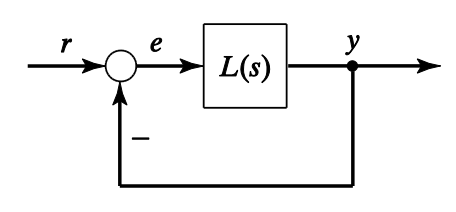
The closed-loop transfer function from to is given by
- One zero at (Green)
- One real pole at (Blue)
- Non-dominant because far away from imaginary axis
- Complex conjugate pole pair at (Red)
- Dominant (close to imaginary axis)
The system performance can be estimated on the basis of the pair of poles.
This matches the standard second-order form of
From this:
- Natural frequency
- Damping ratio
Thus, the expected step response will be:
and