Most systems can be better modeled using high-order transfer functions (more than 2 poles) and have finite zeros. How do these additional poles and zeros affect the standard system response?
Additional Pole
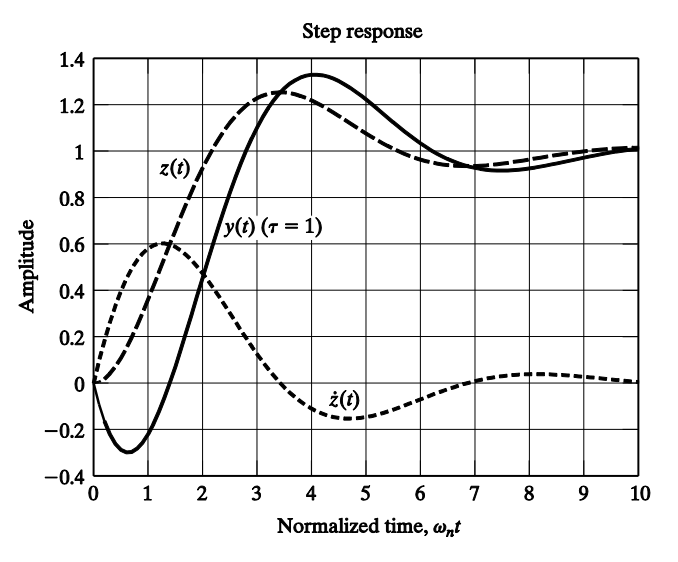
Consider the case when a pole is added to a standard second-order underdamped system:
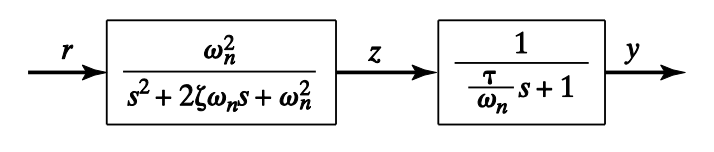
The response of this system will be slower and smoother than the response of the standard second-order system.
- Additional low-pass filtering
Effects of a pole on step response with :
Additional Zero
Minimum Phase Zero
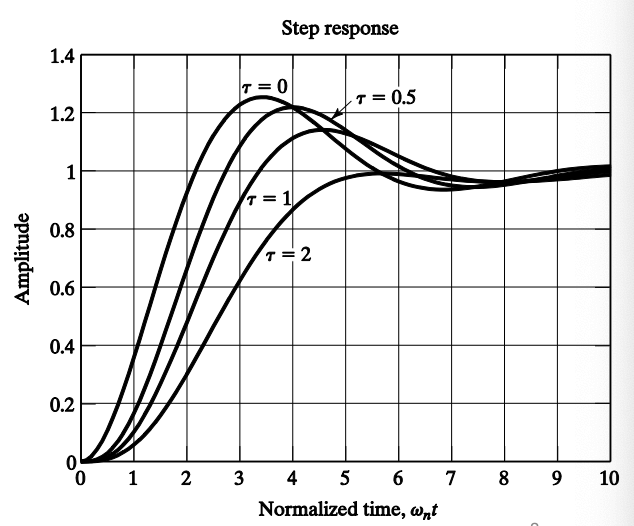
Consider the case when a zero is added to a standard second-order underdamped system, where the the zero added is a minimum phase zero ().

It’s easy to see that:
Since for , the system will have a shorter rise time, a shorter peak time, and a larger overshoot.
Effect of a minimum phase zero on step response:
Nonminimum Phase Zero
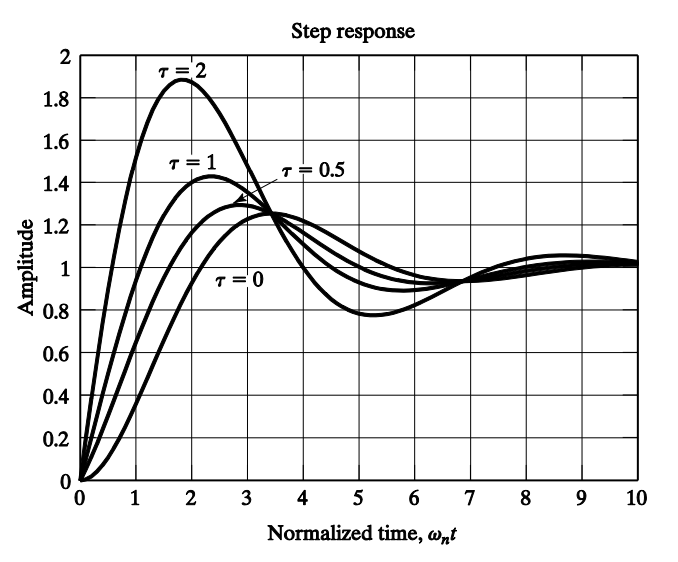
Assume the zero added is a nonminimum phase zero ().
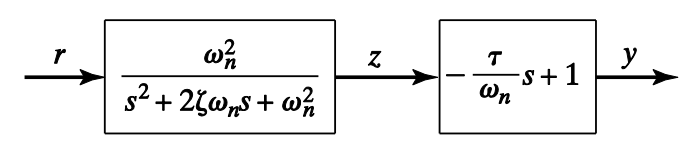
Then we have:
Since for , the response shows undershoot behavior, which is undesirable.
Effects of a nonminimum phase zero on step response with :