If the poles of a system are dominated by a pair of complex poles, then the system can be approximated by a second-order system.
Provided we are provided with specs of settling time and percent overshoot (PO), we can determine the system by working with the formulas below.
- Settling time:
- Percent overshoot:
Design inequalities derived from these:
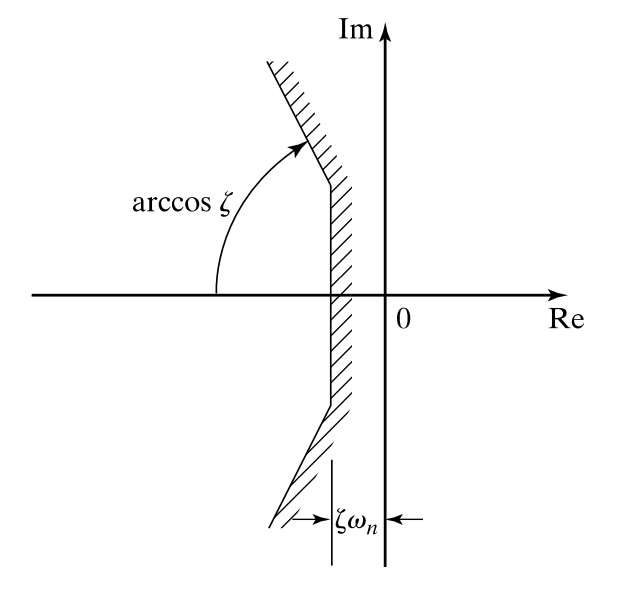
These help place dominant poles in the -plane to meet desired transient performance.
We can place the dominant poles in the desired regions, and place the less dominant poles far away.