Linear velocity:
where is the position.
Angular velocity:
Types of velocity:
- Absolute velocity: Velocity with respect to a point on the same body fixed at origin of global coordinate axes system.
- Velocity difference: Velocity with respect to a point on the same body that is not fixed
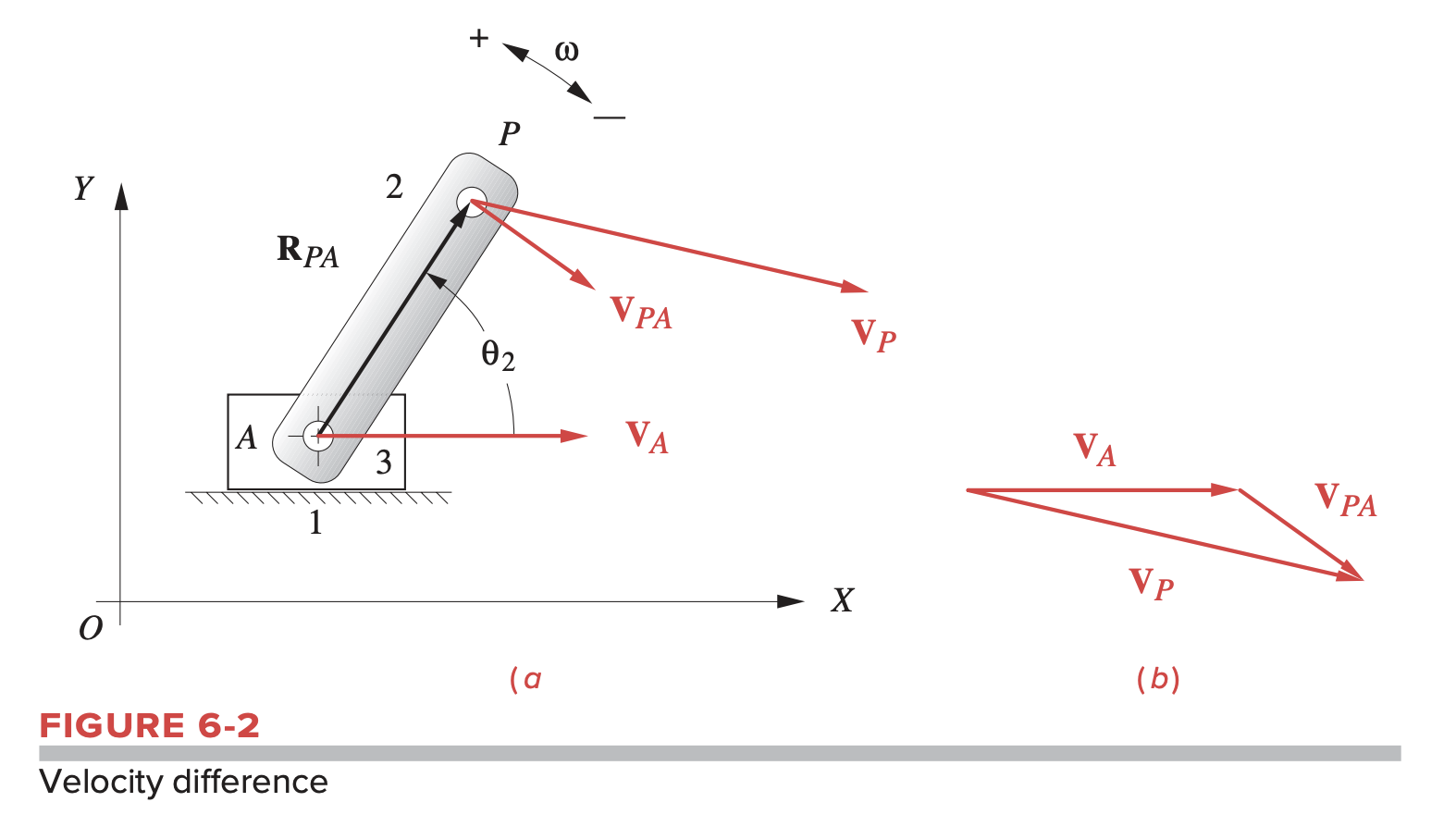
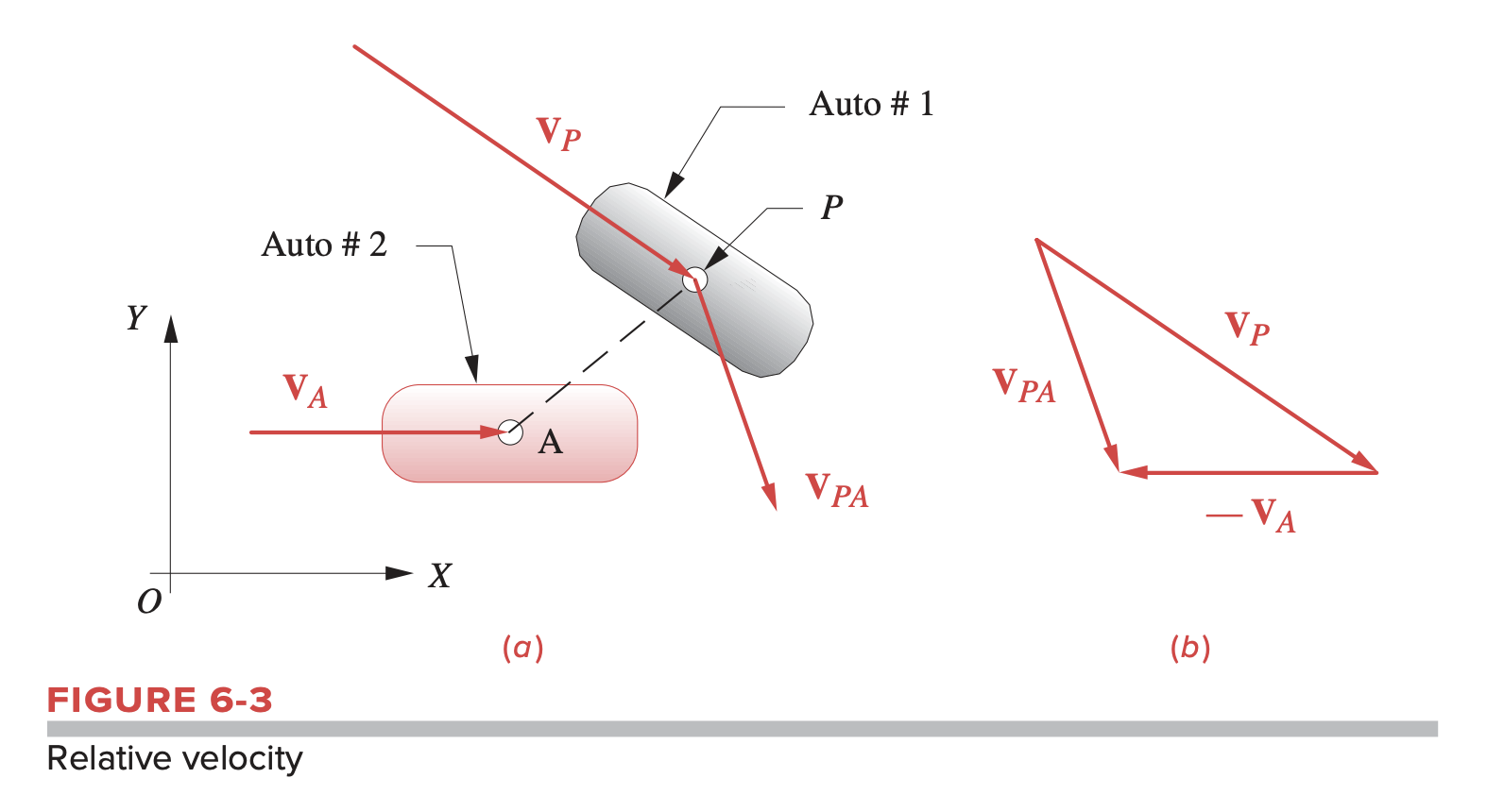
- Relative velocity: Velocity with respect to a point on a different body that is not fixed
Complex Number Representation
Recall that position is given by:
Thus, we have:
where is the scalar length of vector .
Vector Loop Velocity Analysis of Fourbar Linkage
Step 1: Check the reference frame/coordinate system. should be fixed with angle of zero with respect to -axis. If this is not the case, set up a local coordinate system that meets this convention.
Step 2: Check to see if you have all the angles you need. If we are missing , , we will need to do a position analysis first to find these angles.
Step 3: Calculate and .
To do this, we use the vector-loop position equations for the fourbar pin-jointed linkage, which were derived here. The linkage in Figure 6-20 on which we also show an input angular velocity applied to link 2. This can be a time-varying input velocity.
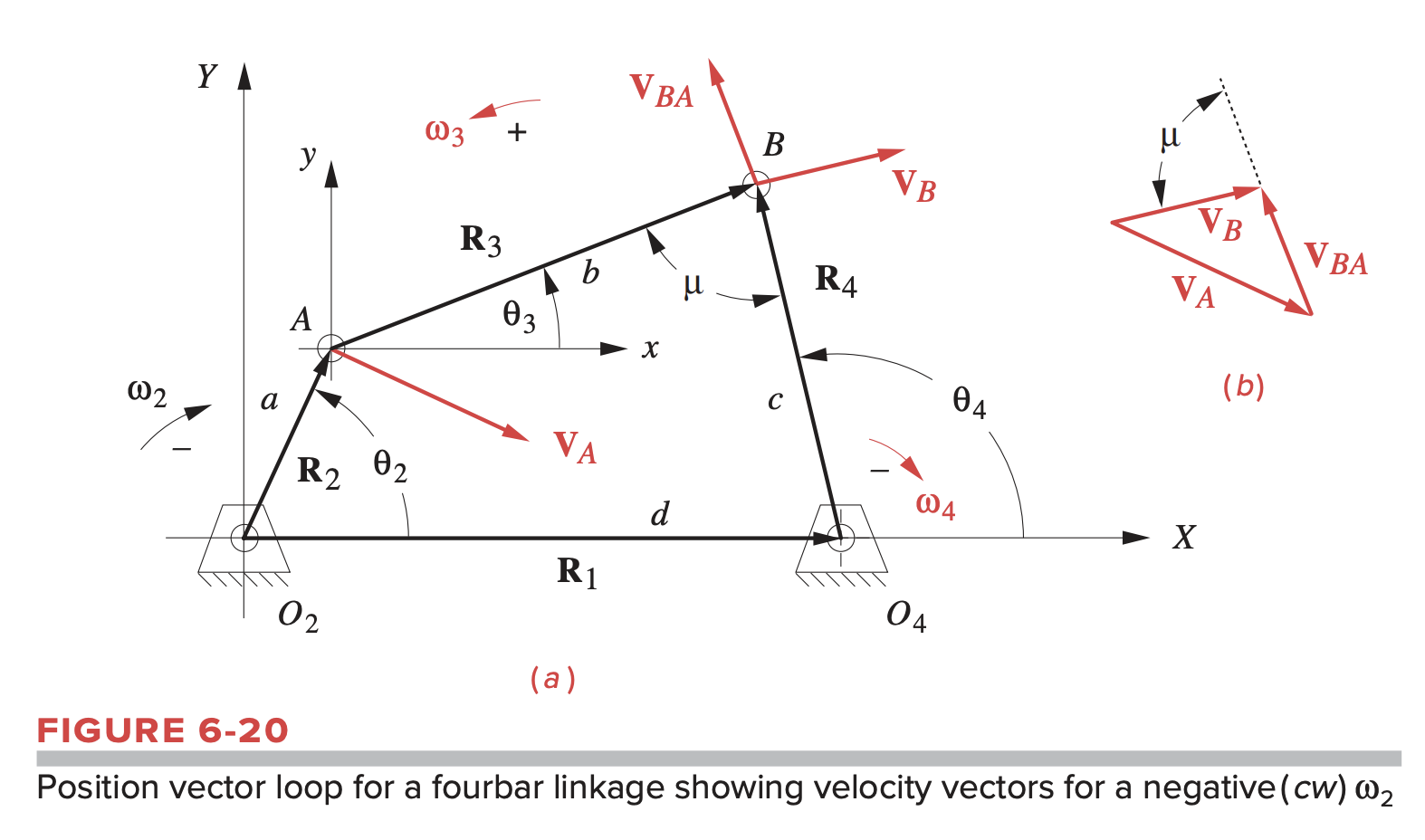
The vector loop equation is:
which we can substitute the complex number notation for the vectors
To get an expression for velocity, we can differentiate this with respect to time:
where we take advantage of the fact that . Note that the term has been dropped, since .
The equation above is also the relative velocity or velocity difference equation:
where:
Solving gives:
Step 4: Solve for the linear velocities with:
If we need to solve for both the open and crossed positions, we will need to do steps 3 and 4 twice; once with for the open position, and once with for the closed position.
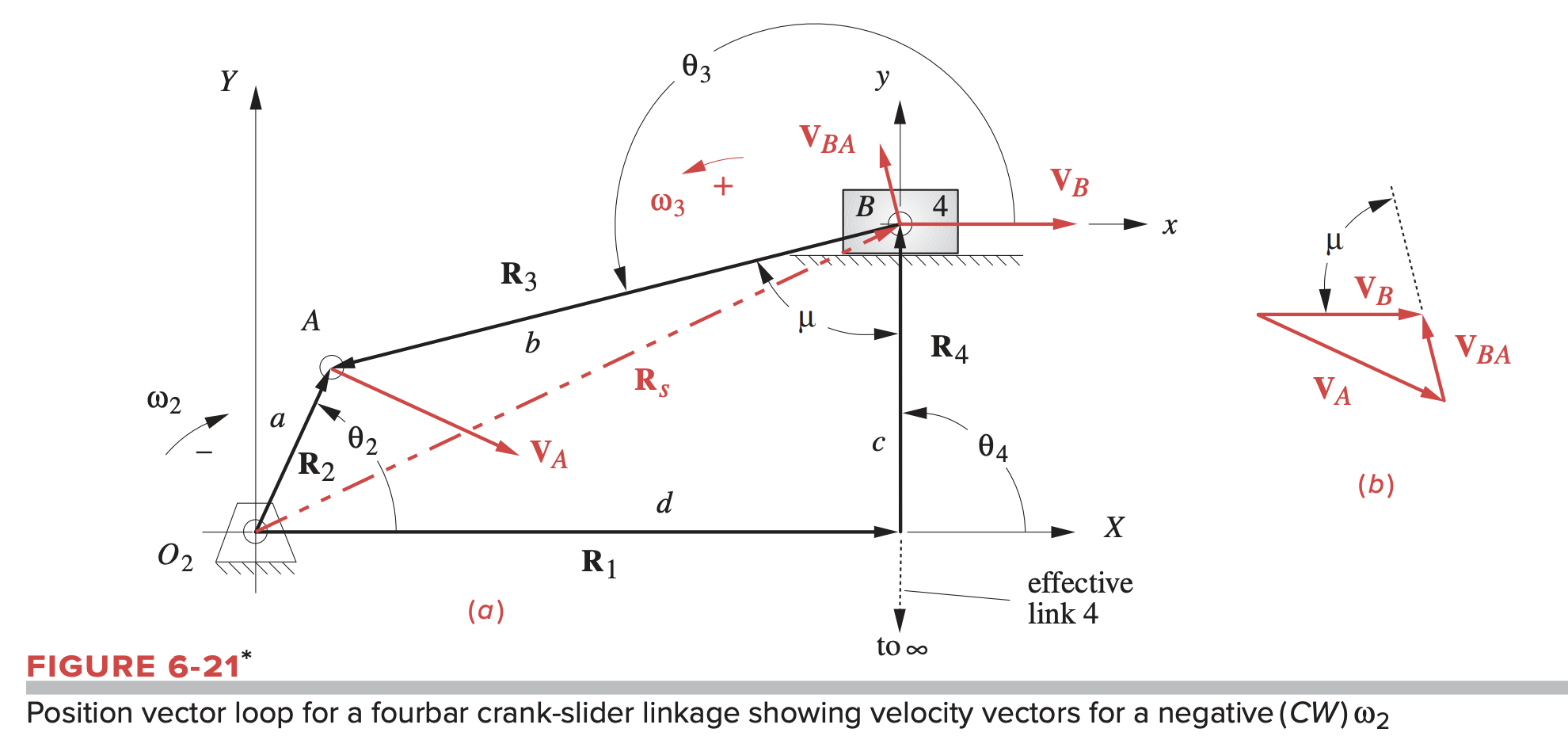
Vector Loop Velocity Analysis of Crank-Slider
We can follow a similar approach for a crank-slider system. Crank is input, slider is output.
Step 1: Check the reference frame/coordinate system.
Step 2: If we are missing and you will need to do a position analysis first to find these parameters.
Step 3: Calculate angular velocity () and linear velocity of slider block . These can be derived similar to above by writing the vector loop equation and then differentiating with respect to tiem.
We have:
Step 4: Solve for the linear velocities, :
If we need to solve for both the open and crossed positions, we will need to do steps 3 and 4 twice; once with for the open position, and once with for the closed position.