Link: https://github.com/theasp/docker-novnc/tree/master Tutorials:
- https://divyanshu-raj.medium.com/ros-2-with-docker-part-1-9060f3095811
- https://wiki.ros.org/docker/Tutorials/GUI#Using_noVNC
Nice way to get ROS/ROS2 visualization working on Docker, which lets me use it on Mac.
- Create network:
docker network create ros - Can then run noVNC with:
docker run -d --rm --net=ros --env="DISPLAY_WIDTH=3000" --env="DISPLAY_HEIGHT=1800" --name=novnc -p=8080:8080 theasp/novnc:latest- Make sure the sim container is on the same network and has the display env set to to noVNC:
docker run --name dolagon --env="DISPLAY=novnc:0.0" --network=ros -e ROS_DOMAIN_ID=9 -e RMW_IMPLEMENTATION=rmw_cyclonedds_cpp -e CYCLONEDDS_URI=/opt/polymathrobotics/dolagon_config/share/dolagon_config/config/dds_config.xml registry.gitlab.com/polymathrobotics/dolagon/dolagon_sim:humble ros2 launch dolagon_sim sim.launch.pyAlternatively, the Dockerfile can include the line ENV DISPLAY=novnc:0.0 in it.
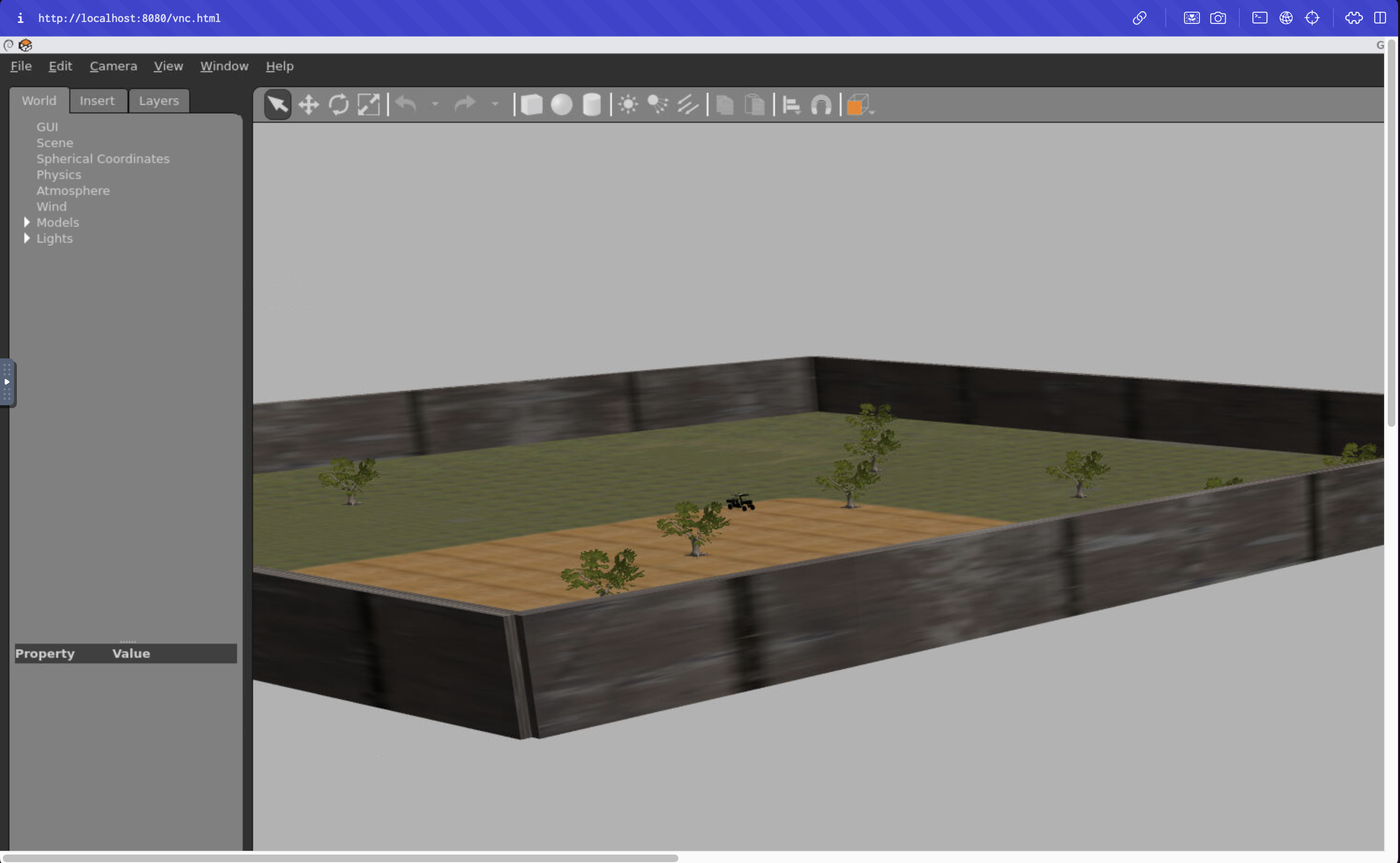
Gazebo sim running on noVNC on localhost:8080:
Noetic
Start noVNC with:
docker run -d --rm --net=ros --env="DISPLAY_WIDTH=1512" --env="DISPLAY_HEIGHT=982" --name=novnc -p=8080:8080 theasp/novnc:latestStart ROS container with:
docker run -it --privileged --ipc=host \
--env="DISPLAY=novnc:0.0" \
--name="ros" \
--network=ros \
--device=/dev/ttyUSB0:/dev/ttyUSB0 \
-e "QT_X11_NO_MITSHM=1" \
-e "XAUTHORITY=$XAUTH" \
--cap-add=SYS_PTRACE \
-v /Users/kai/code/catkin_ws:/home/catkin_ws \
osrf/ros:noetic-desktop-full bashAttach windows to ROS container:
docker exec -it ros /bin/bash- Remember to
source /opt/ros/noetic/setup.bashand runroscore
MTE 544 Set-up
docker pull osrf/ros:humble-desktop-full
docker network create ros
docker run -d --rm --net=ros --env="DISPLAY_WIDTH=1352" --env="DISPLAY_HEIGHT=878" --name=novnc -p=8080:8080 theasp/novnc:latest
docker run -it --privileged --ipc=host \
--env="DISPLAY=novnc:0.0" \
--name="mte544" \
--network=ros \
--device=/dev/ttyUSB0:/dev/ttyUSB0 \
-e "QT_X11_NO_MITSHM=1" \
-e "XAUTHORITY=$XAUTH" \
--cap-add=SYS_PTRACE \
-v /Users/kai/code/mte544:/home \
osrf/ros:humble-desktop-full bash
Gazebo install:
curl -sSL http://get.gazebosim.org | sh
apt install ros-humble-irobot-create-description
apt install ros-humble-turtlebot3-msgs