Assume that we have an objective of the form:
where is the function computed by the neural network, and is the weight matrices and vectors of the network.
When we perform “naive” batch gradient descent, we use the update rule
which is equivalent to
So, we sum up the gradient of loss et each training point, with respect to , and then take a step in the negative direction of the gradient.
In Stochastic Gradient Descent, we repeatedly pick a point at random from the data set, and execute a weight update on that point alone:
If we pick points uniformly from the dataset, and decrease at an appropriate rate, we are guaranteed, with high probability, to converge at least to a local optimum.
Batch vs. Stochastic
The batch method takes steps in the exact gradient direction but requires a lot of computation, especially if the dataset is large. The stochastic method begins moving right away, and can sometimes make very good progress before looking at even a substantial fraction of the whole data set, but if there is a lot of variability in the data, it might require a very small to effectively average over the individual steps moving in “competing” directions.
Mini-batches
An effective strategy is to “average” between batch and stochastic gradient descent by using mini-batches. For a mini-batch of size , we select distinct data points uniformly at random from the data set and do the update based on just their contributions to the gradient:
For , this would be equivalent to SGD; for , this would be equivalent to naive batch descent.
Picking unique points at random from a large data-set is potentially computationally difficult. An alternative strategy, if you have an efficient procedure for randomly shuffling the data set (or randomly shuffling a list of indices into the data set) is to operate in a loop, roughly as follows:
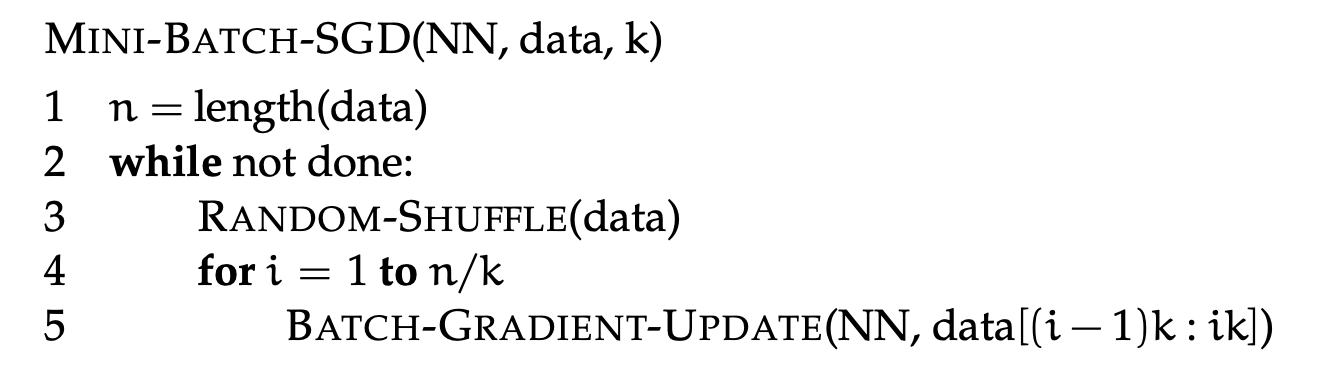
The term epoch is used to refer to one iteration through the training data. Sometimes it is also used to mean “one batch”.