Definition
An LTI state space model of a system is a model of the form:
such that for any initial condition and any input signal / , the system output is equal to the output / of the equations above.
Example: Cart
Cart with applied force , mass and damping due to friction :
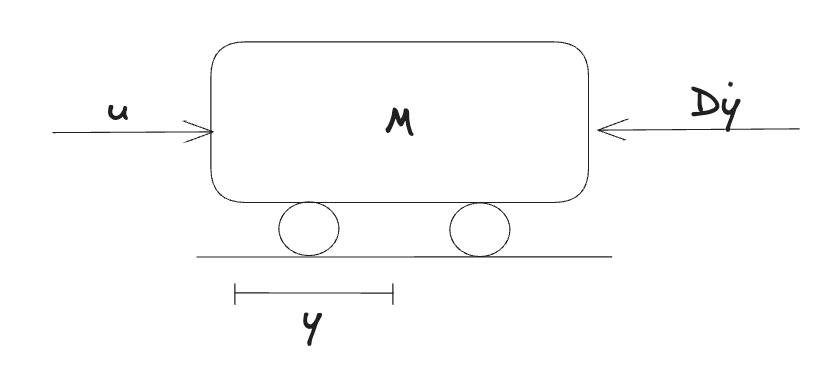
Newton’s 2nd Law gives
We will put this in a “standard” form which requires only 1st order derivates of our variables (i.e., a first order vector ODE). This standard form has many advantages for stability analysis and control design. It’s called a state space model or representation.
As our equation is a 2nd order ODE, to write it as a first order ODE we will need 2 variables (known as states).
One way to do this:
Then:
More compactly:
Also,
Thus, we can arrive at the standard state space representation for LTI systems:
where are constant matrices.
Note: State space representations are NOT unique!
For example, we could instead have
State Space → Frequency Domain
We have
Taking the Laplace transform gives us
Finding the transfer functions for the first equation:
Substituting into the equation for :
So we can write where , allowing us to convert from state space to frequency domain.
Frequency Domain → State Space
Let be real, rational, and proper. Then a state space realization (or just realization) of that is an LTI state space model of the form
such that .
Note: State space realizations are NOT unique!