To consider stability for continuous-time systems, consider the following example system:
Then:
Recall that the inverse Laplace transform is given by
This system has 3 possible behaviors based on the value of :
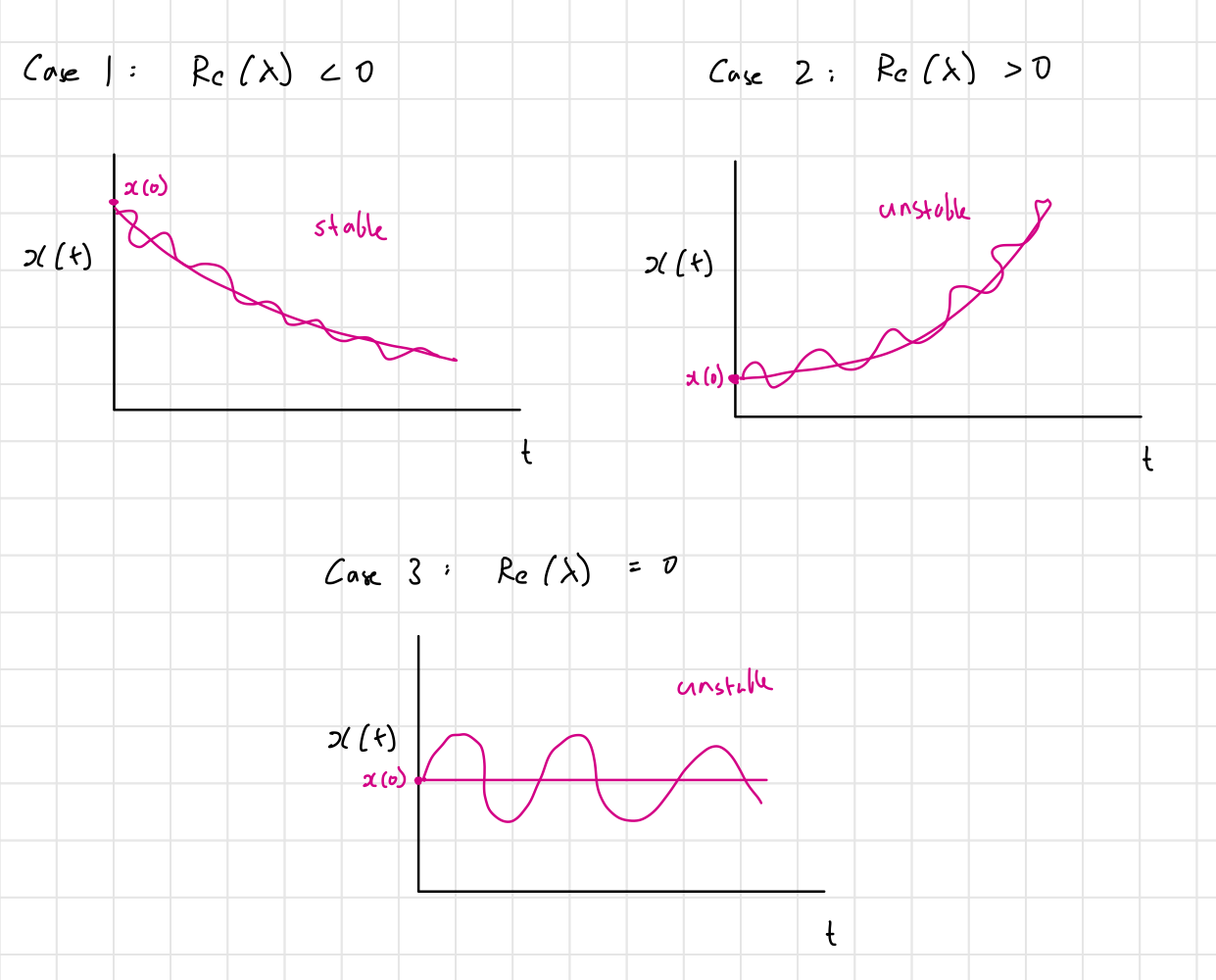
- Thus, stability occurs if (alternatively, we can say that ).
- The case could be considered “marginally stable” but in MTE 484 it’s considered as unstable.
Another case where have an input:
Then:
Thus, is a pole of the transfer function . (Does this mean a stable system will always be stable )
Stability in continuous-time systems
A real, rational transfer function is stable if all the poles of lie in the open left-half plane (OHLP), denoted . which does not include the imaginary axis (no pole at zero allowed).
Quick Examples
- is stable
- is unstable (pole in the right hand plane)
- is unstable (pole at zero)