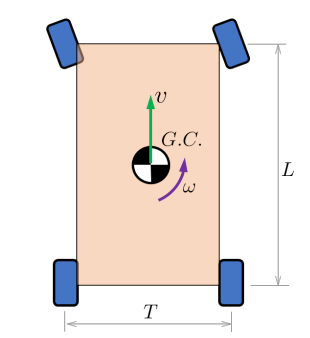
A 4-wheel front steering robot has the following form:
Often this is simplified to a bicycle model, where two wheels are lumped into a single wheel
- There are a few different forms of the bicycle model depending on the point of interest.
Bicycle model for G.C
For example, the bicycle model for the geometric center/centroid:
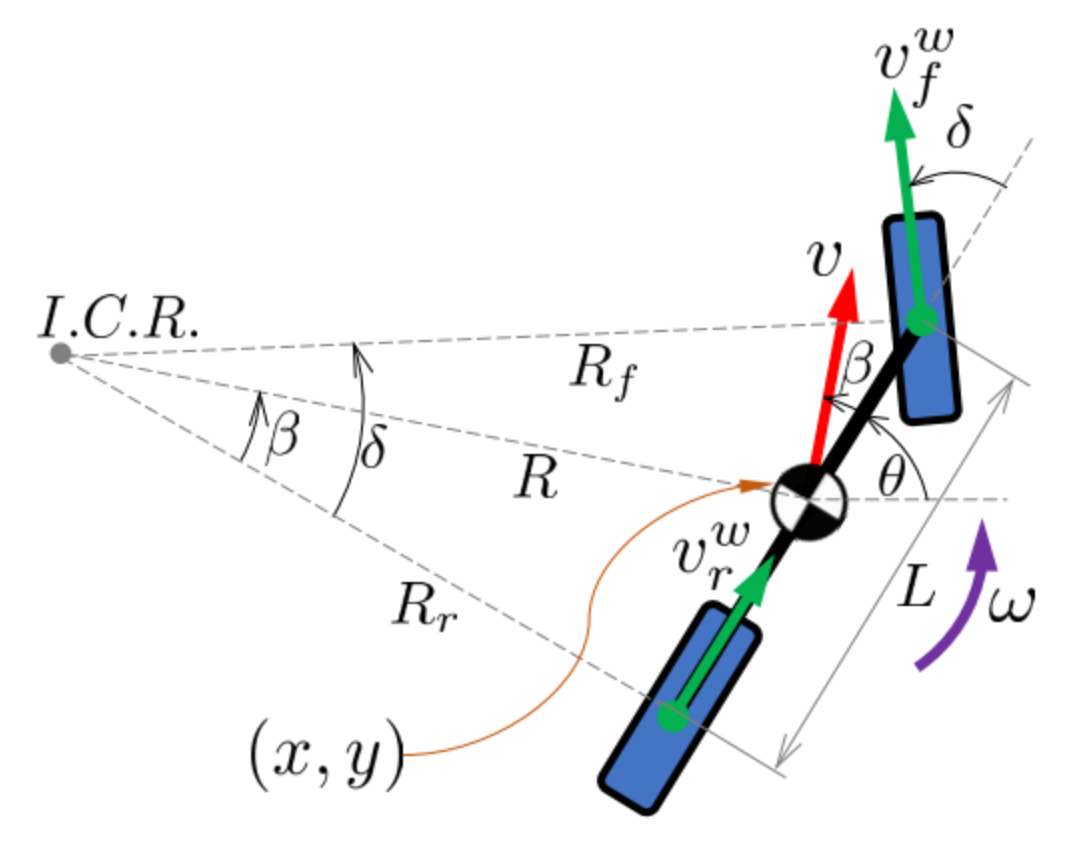
From the right triangles that connect the axles to the I.C.R:
Thus, we have
- where we have
Kinematics for wheel control
What are the wheel speeds to move the G.C with if we are doing rear-wheel drive or front-wheel drive?
Rear Wheel Drive
Pure rolling at the real wheel (with wheel radius ) gives its linear speed:
which results in
Thus, we have:
Equivalently, if the rear wheel is the actuator (rear-wheel drive):
Front Wheel Drive
Similarly, for front-wheel drive, we would have