Consider the system below:
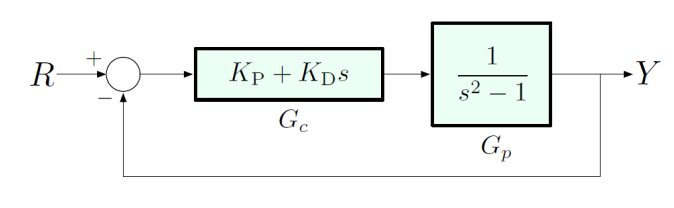
We have:
Poles:
We will examine the impact of varying , assuming the ratio is fixed.
We can write the characteristic equation in what is called the Evans form by factoring out the term that we are interested in:
We can simply write the terms as
such that there is a zero at .
Rule A of root locus gives us:
Rule B states that branches start at open-loop poles:
Rule C states that branches end at open-loop zeros:
(We will see why later.)
So the root-locus plot looks something like:
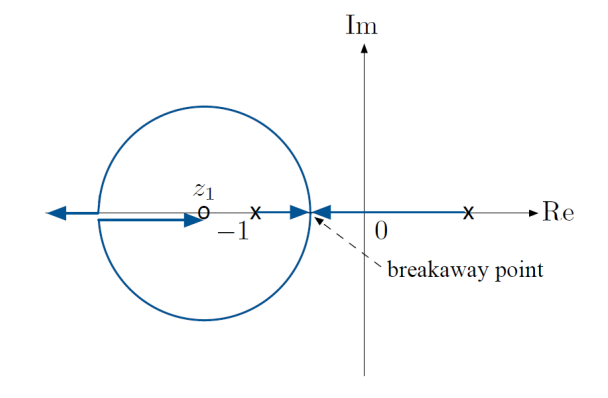
Why does one of the branches go off to ?
Since , , meaning that the square root term is smaller than .
Thus, as , the plus case will approach the finite zero . The minus case will approach .
Another question: Is the point on the root locus? We can find out by seeing if there’s any for which this is possible.
Main points:
- When zeros are in LHP, high gain can be used to stabilize the system (although we need to worry about zeros at infinity)
- If there are zeros in the RHP, high gain is always disastrous
- PD control is effective for stabilization because it introduces a zero in LHP.