Sensors cannot instantaneously respond to changes in the values that they measure. There is some delay, which may be very important to characterize.
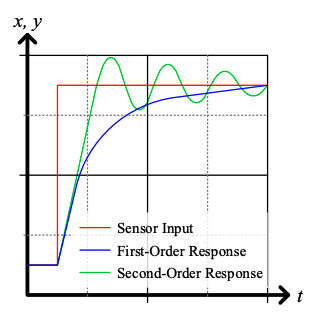
First-order Response
For some sensors, the speed of sensor response to an input is quantified by a time constant , similar to RL circuits. This is expressed as of the rise time, such that:
If needed, a first-order factor may be included in the sensor’s transfer function to model this low-pass behaviour:
Second-Order Response
Some sensors may be modeled as a second-order system if the step response exhibits overshoot or “ringing”, which occurs when a system is underdamped. Usually, adding damping (resistance, friction, rotational damper) will eliminate oscillations. Ringing can lead to instability if feedback is present. A second-order factor with appropriate natural frequency.
A second-order factor with appropriate natural frequency and damping factor, and , can be included in the transfer function.