For robotics, each link, joint, and sensor has its own coordinate system. A vector in the camera system may have coordinates ; in the world coordinate system, its coordinates may be . This transformation is defined by a transformation matrix .
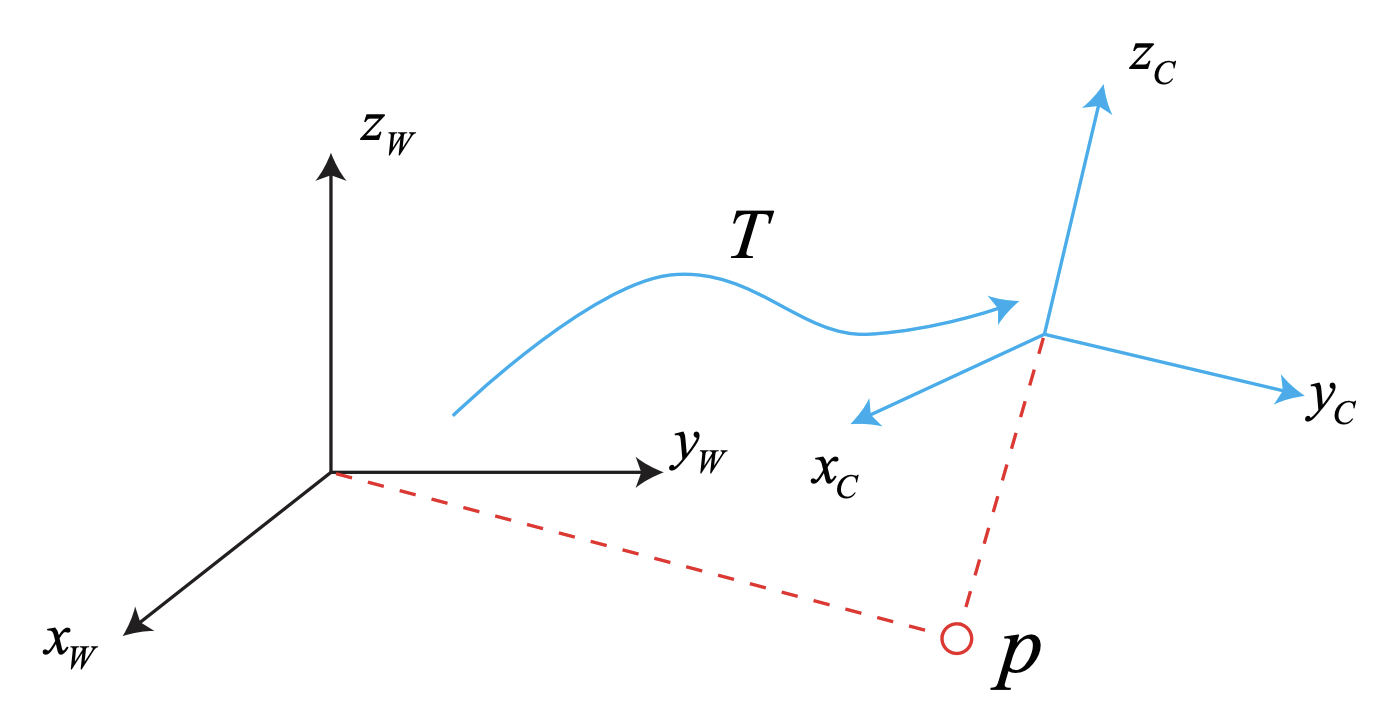
The motion between 2 coordinate systems consists of a rotation plus a translation (rigid body motion). During the transformation, the length and angle of vector will not change, which makes this transformation Euclidean Transformation.