How do we build dynamic, recurrent networks using population coding methods?
Consider a dynamic model of a leaky integrate-and-fire (LIF) neuron that contains two time-dependent processes:
- is a synaptic time constant
- is the a membrane time constant
- : is the input current
- is the post-synaptic current
- is the membrane potential
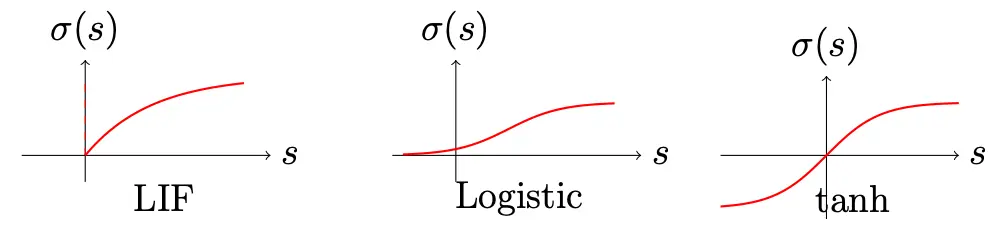
- is a nonlinear activation function
Recall previous forms of :
Equilibrium Solutions
We can find equilibrium solutions to the above.
Current:
At equilibrium, , so .
Activity:
\tau_{m} \frac{dv}{dt} = -v+\sigma(s) $$ At equilibrium, $\frac{dv}{dt}=0$, so $v = \sigma(s)$. ## Variants **Case 1:** $\tau_{m} \ll \tau_{s}$. If the neuron membranes react quickly (i.e., reach equilibrium quickly) compared to the synaptic dynamics:\begin{cases} \tau_{s} \frac{ds}{dt} = -s+C \[2ex] v = \sigma(s) \end{cases}
**Case 2:** $\tau_{s} \ll \tau_{m}$. If the synaptic current changes quickly compared to the neuron activity:\begin{cases} s=C \[2ex] \tau_{m} \frac{dv}{dt} = -v+\sigma(s) \end{cases}
v=\sigma(s), \quad s=C
## Recurrent Networks The feedback afforded by recurrent connections can lead to interesting dynamics. Consider a neural integrator: ![[Population Coding Dynamics-1775681897945.webp]] Consider a fully-connected population of $N$ neurons. ![[Population Coding Dynamics-1775681928027.webp|519]] We assume $\tau_{m}$ is small, such that $v=\sigma(s)$. Then, effectively, the time dynamics are dictated by the synapses,\begin{align} \tau_{s} \frac{ds}{dt} & = -s +C \[2ex] \tau_{s} \frac{ds}{dt} & = -s + (f(v)+g(x))E+\beta \end{align}
- $-s$ corresponds to intrinsic decay - $C$ corresponds to all inputs - $f(v)$ is recurrent feedback - $g(x)$ is incoming input Let's assume that the input $g(x)$ is zero, and seek a network that simply maintains its state over time. We choose the recurrent connections to counter the intrinsic decay:\tau_{s} \frac{ds}{dt} = -s + f(v)E + \beta
We want the right side to equal zero. At equilibrium, input $y$ yields input current $s$, i.e. $s=yE+\beta$. Then, the hidden state is $v=\sigma(s)$.\begin{align} -s + f(v)E + \beta & = 0 \ f(v)E + \beta & = s \ f(v)E + \beta & = yE+\beta \ f(v) & = y = vD \end{align}
Thus, $f(v)$ is the identity decoding. We can re-write our DE as:\frac{ds}{dt} = \frac{1}{\tau_{s}} (-s+yE+\beta) + \frac{1}{\tau_{s}}(f_{2}(v)+g(x))E \quad \quad \quad \quad (\ast )
- $-s$ is decay - $yE+\beta$ is reinjection - $f_{2}(v)$ is recurrent input - $g(x)$ is the new input For a simple integrator, the governing DE is $\frac{dy}{dt}=x$. Recall:s = yE + \beta \quad \Longrightarrow \quad \frac{ds}{dt} = \frac{dy}{dt}E \quad \quad \therefore \frac{ds}{dt} = xE
How do we we choose $f_{2}(v)$ and $g(x)$ in $(\ast )$ to get this DE?\frac{1}{\tau_{s}}(f_{2}(v)+g(x))E = xE \quad \Longrightarrow \quad f_{2}(v) = 0, ,,g(x)=\tau_{s}x
The full $DE$ for $s$ to implement an integrator is:\begin{align} \tau_{s} \frac{ds}{dt} & = -s + yE + \beta+ \tau_{s}xE \ & = -s + (y+\tau_{s}x)E + \beta \end{align}
- $y+\tau_{s}x$ is what we input into the population ![[Population Coding Dynamics-1775682561803.webp]] ![[Population Coding Dynamics-1775682568449.webp|450]] You can also get the recurrent network to solve (simulate) the dynamical system\frac{dy}{dt} = f(y)
by setting the recurrent input to be $y+\tau_{s}f(y)$. ![[Population Coding Dynamics-1775682615855.webp|338]]