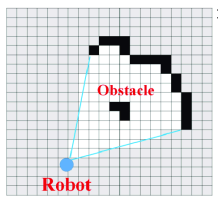
In an occupancy grid mapping scheme, the map is represented as a grid (like pixels in an image):
- rows and columns
In a standard mapping problem, for the -th grid cell, we assign a pdf .
- Free (no obstacle) means
- Occupied means
We then use a Bayes Filter to estimate its posterior:
If we assume that each cell is independent, we have
Since can either be (free) or (occupied), this is binary Bayes filter.