Sensors do not measure the robot’s pose directly. Instead, sensors produce readings , such as:
- Range to a wall or landmark (LiDAR / sonar)
- Bearing / angle to an object (camera)
- GPS coordinates
- Magnetometer heading
- Visual feature matches
So the measurement model is a function
where is the robot’s pose and is the map.
Unlike motion models which are probabilistic, measurement models are typically static.
Example
Consider a robot that observes landmark at map coordinate . The robot measures three things for each landmark:
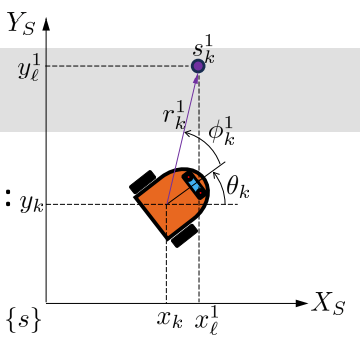
- : Range/distance to landmark (noisy)
- : Bearing/angle to landmark (noisy)
- : Signature (e.g. average color) to landmark
Then, the measurements looks like
These measurement values depend on the robot’s pose and the map, so they can be written as functions of and , i.e. and .
Probabilistic Measurement Model
How do we incorporate probabilistic noise into sensor models?
- Note that the map is an input
Unlike motion models, we usually need only the posterior (or generative) model , i.e. the sample model is not normally needed.