Example 4.1: Closed-loop stability
Consider the following standard negative feedback system:
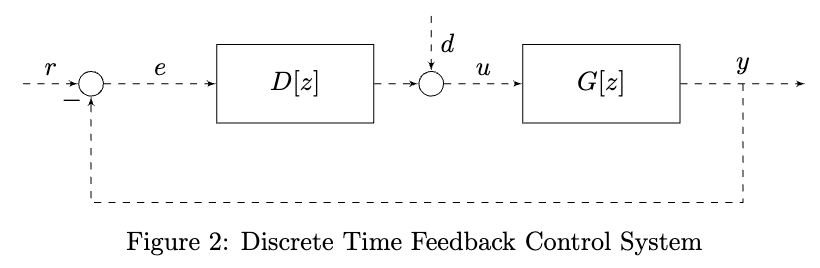
where we have
To check closed-loop stability, we need to check the closed-loop transfer functions.
- Roots: -0.48, 0.34, 0.77
- Roots: -0.48, 0.34, 0.77
- Roots: -0.48, 0.34, 0.5, 0.77
Then:
- are real, rational and proper.
- Since the poles of these lie in the open unit disk the TFs are stable [definition of stability].
- These TFs are BIBO stable [theorem from class]
- The system is closed-loop stable [definition of closed-loop stability]
IOP Theorem
Theorem IOPa.
If results in closed-loop stability, then , , , satisfying the IOP equations:
Let’s check for our example above:
Similarly, we can show that .
The equations makes sense because
Theorem IOPb.
If satisfy the IOP equations (i)-(iii) and we choose , then , , and .
Example 4.2
Given some “arbitrary” TFs, , satisfy IOP equations, Solve for , Verify that the CLTF = .
Example 4.3: SPA
Assume that our plant only has simple poles, such that:
- Simple pole = poles that are not repeating
Then, we approximate to be
Then, solving for from gives:
- The poles from to are the stable poles
- The last term is the unstable poles from
We have: