Starting with a system in continuous time:
In LTI systems, we could write an explicit solution for a given ; however, we cannot do this for the vast majority of non-linear systems.
Thus, we aim to simulate the system:
- Goal: Determine the trajectory for the system for some initial condition
- Challenge: Computers operate in discrete time
To solve, this we approximate continuous-time system with a related discrete time system.
First, we fix and assume for some positive integer .
This procedure involves summing the area under the curve in the figure below:
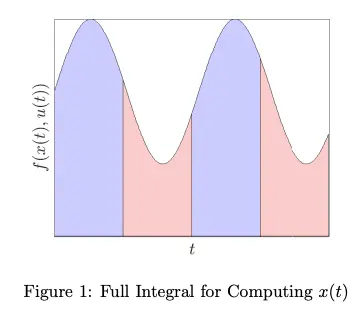
Say we know the value of at time , then
This is still exact because is defined with the integral of a continuous-time function, but this is intractable to solve.
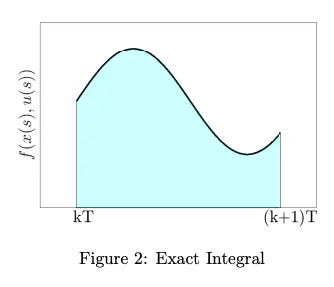
Thus, the idea is then to approximate using a finite number of discrete points.
Left-side rule - Euler Integration

This is essentially Euler integration.
Right side rule - Backwards Euler integration
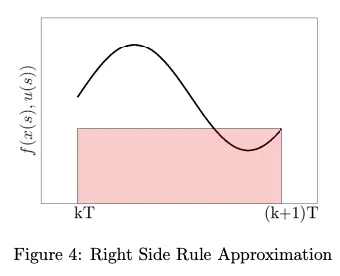
This is backward Euler integration.
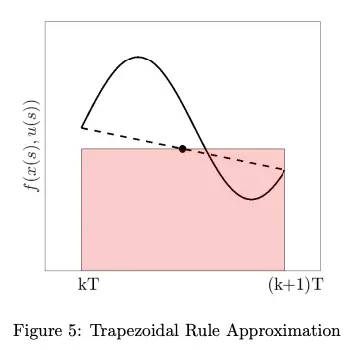
Trapezoid Rule