After we detect distinctive keypoints in images, we want to recognize the same physical point when seen again from:
- A different viewpoint
- A different camera
- A later time
Some common scenarios where this is used is panorama stitching and stereo matching.
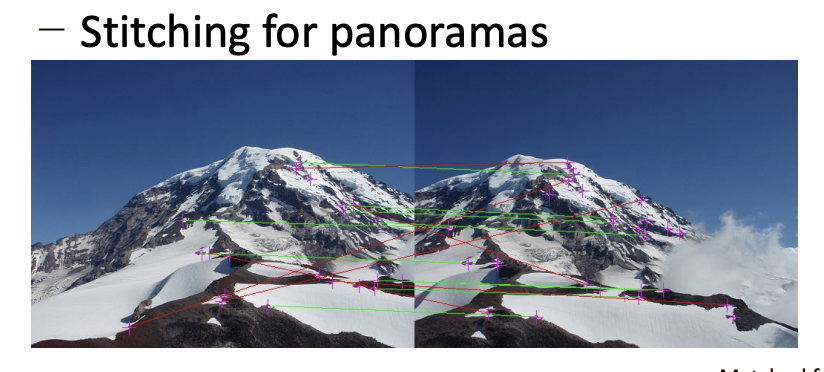

After we’ve found features using our feature extraction methods, how do we tell which ones are correct/incorrect matches?
Least squares: Assumes most matches are correct and fits a transformation (e.g., fundamental matrix) that best explains them.
RANSAC is the more standard approach:
- Randomly pick a small set of matches
- Compute the geometric model (e.g., essential / fundamental matrix)
- Test how many matches agree with this model (called inliers)
- Repeat many times
- Keep the model that has the most inliers