When gears are used to transmit motion between intersecting shafts, some form of bevel gear is required.
Geometry
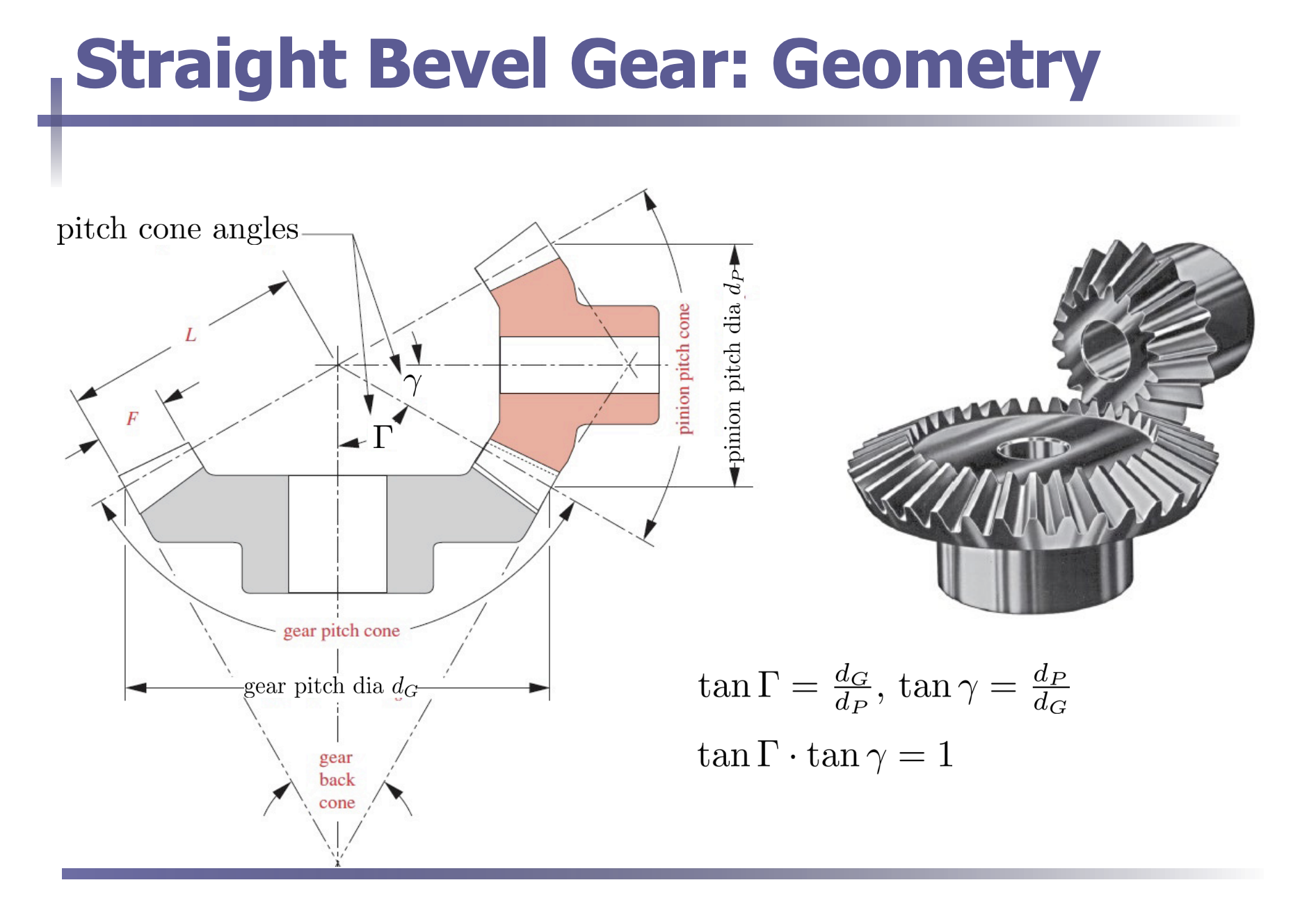
The pitch of bevel gears is measured at the large end of the tooth. Both the circular pitch and the pitch diameter are used calculated in the same manner as for spur gears.
The pitch angles are defined by the pitch cones meeting at the apex, as shown in the figure. They are related to the tooth numbers as follows:
where the subscripts refer to the pinion and gear, respectively, and where and are the pitch angles of the pinion and gear.
Loads
Loads Analysis
Procedure
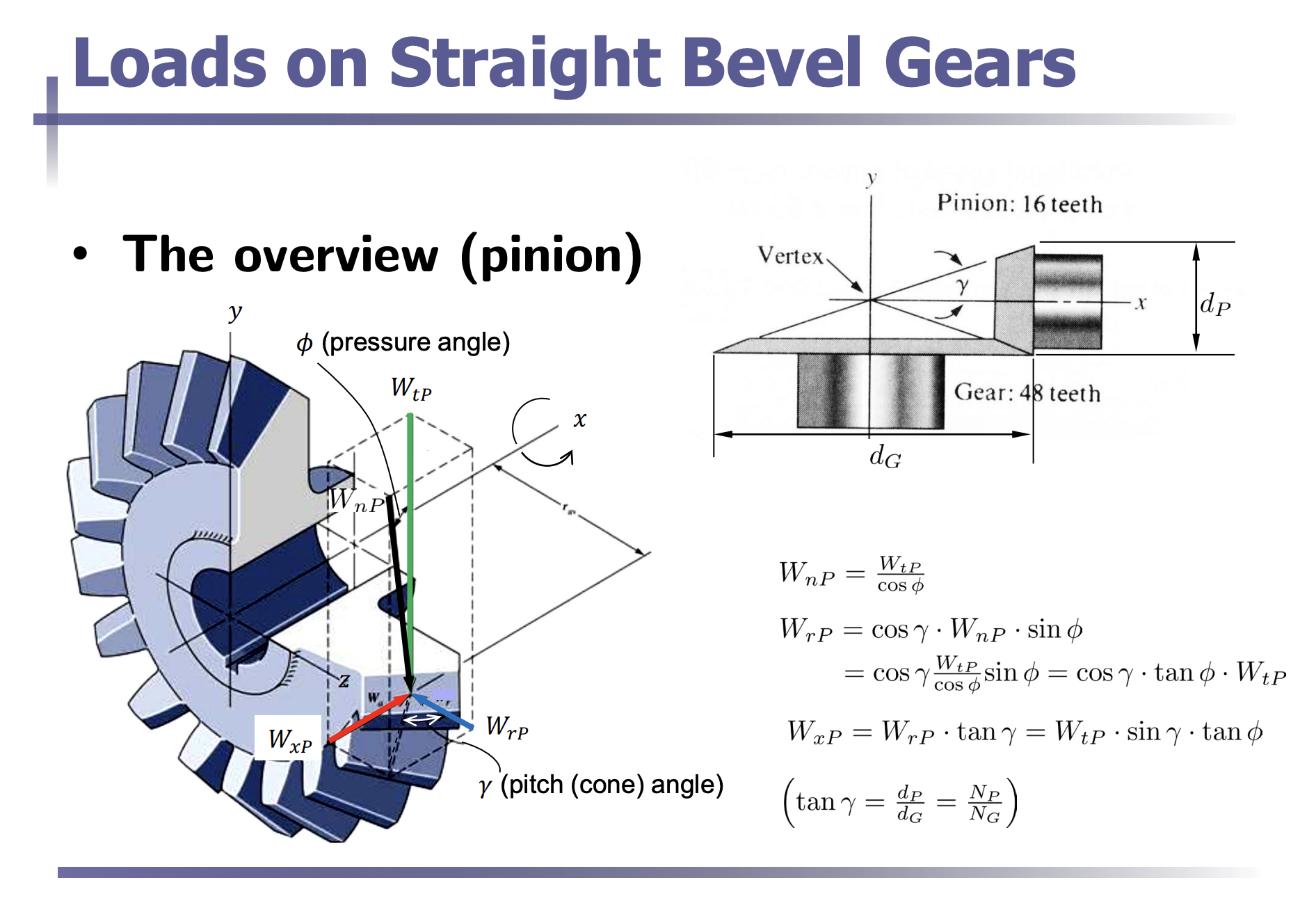
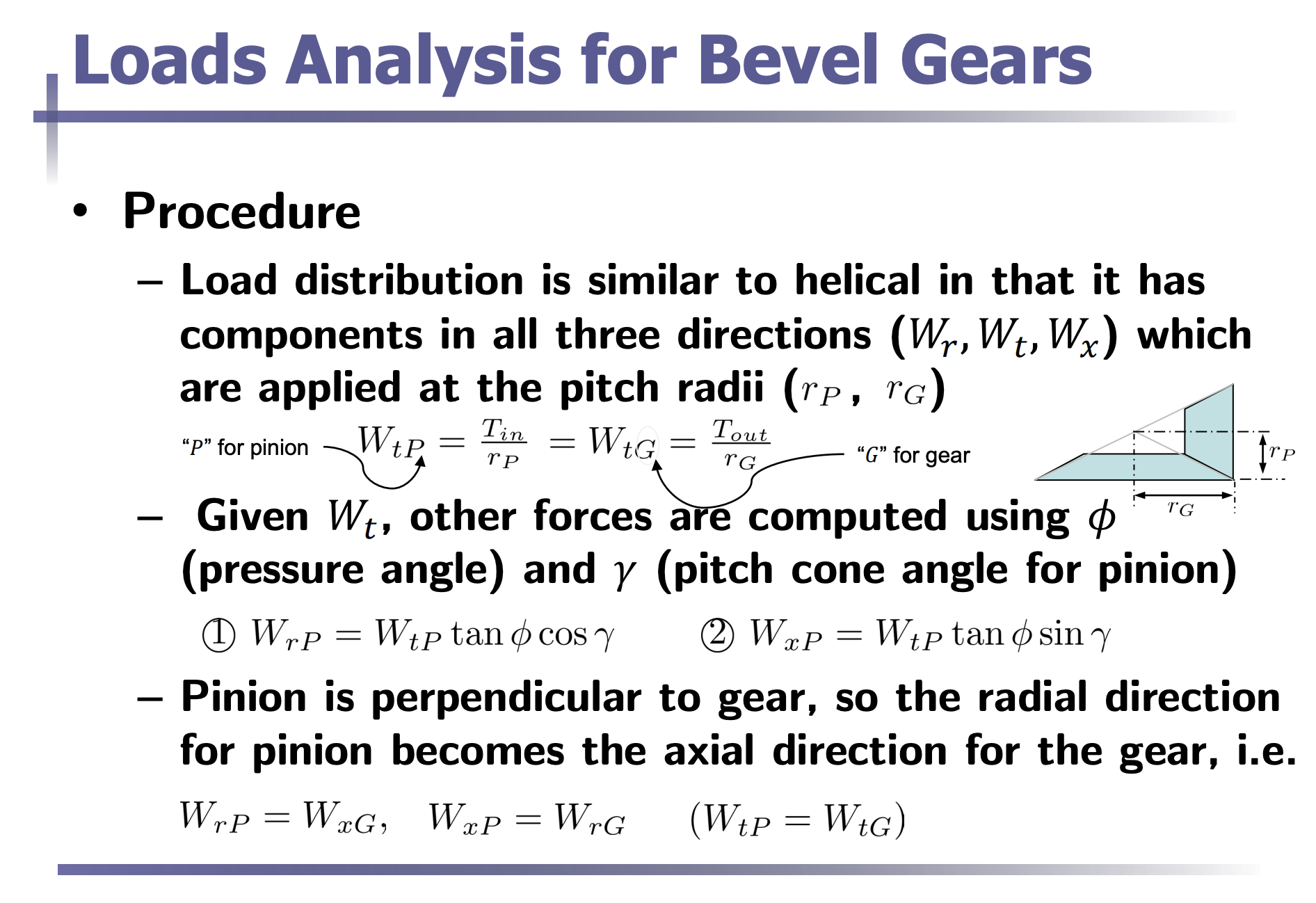
- Load distribution is similar to helical gears in that it has components in all three directions () which are applied at the pitch radii ().
- With for pinion and for gear, we have:
- Given , other forces are computed using (pressure angle) and (pitch cone angle for pinion):
- Pinion is perpendicular r to gear, so the radial direction for pinion becomes the axial direction for the gear: