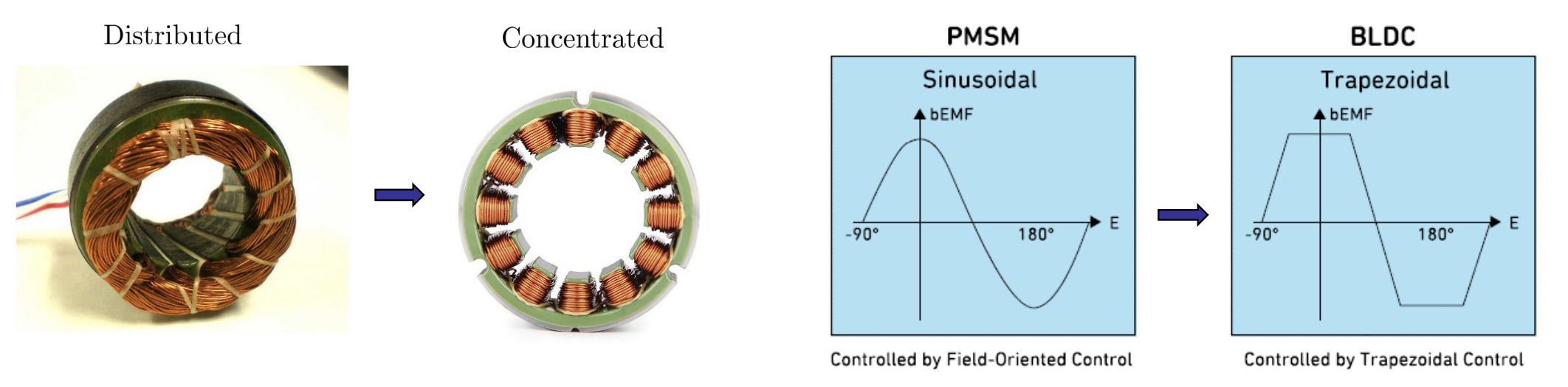
From PMSM to Brushless DC Motors
There are two things we can simplify from PMSM:
- Coils can be made concentrated instead of distributed
- Drive signals can be made trapezoidal instead of smooth sinusoid
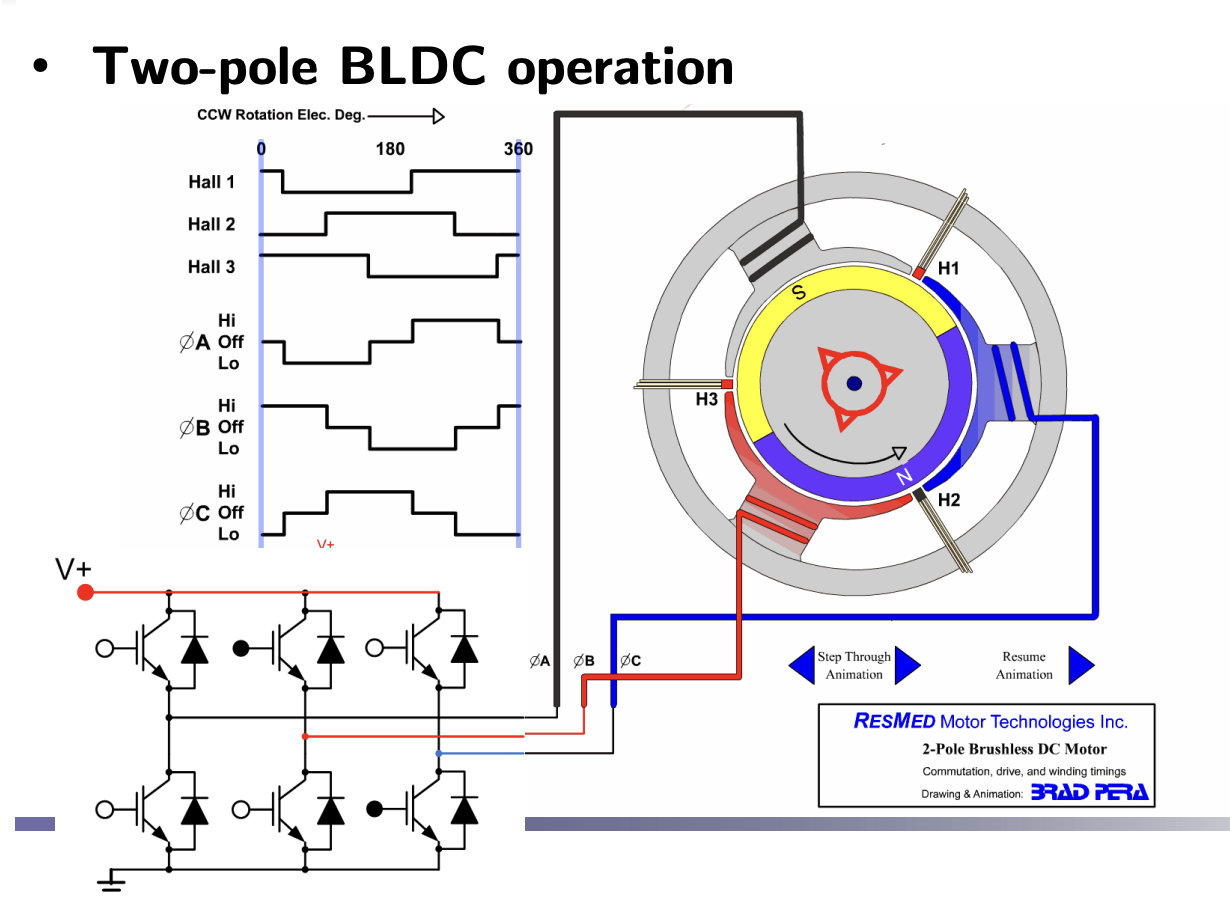
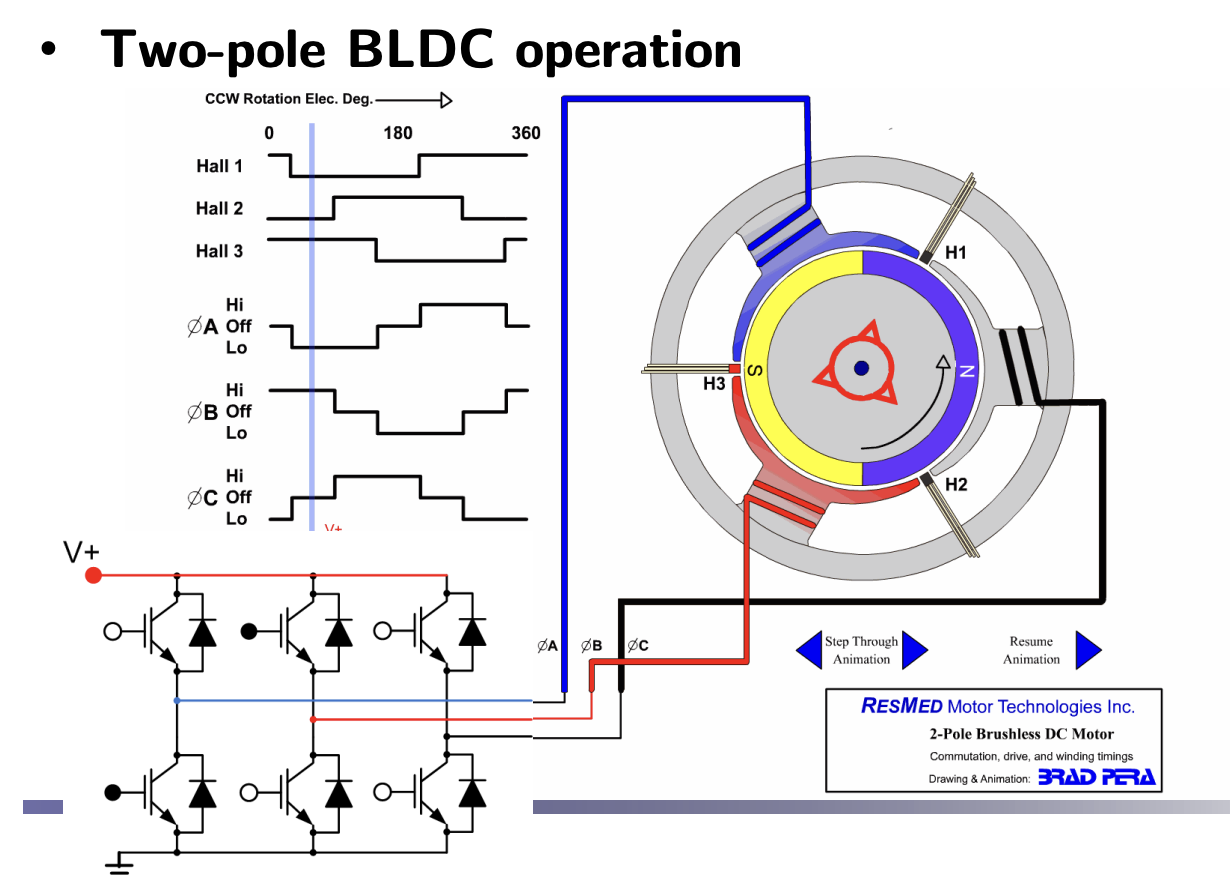
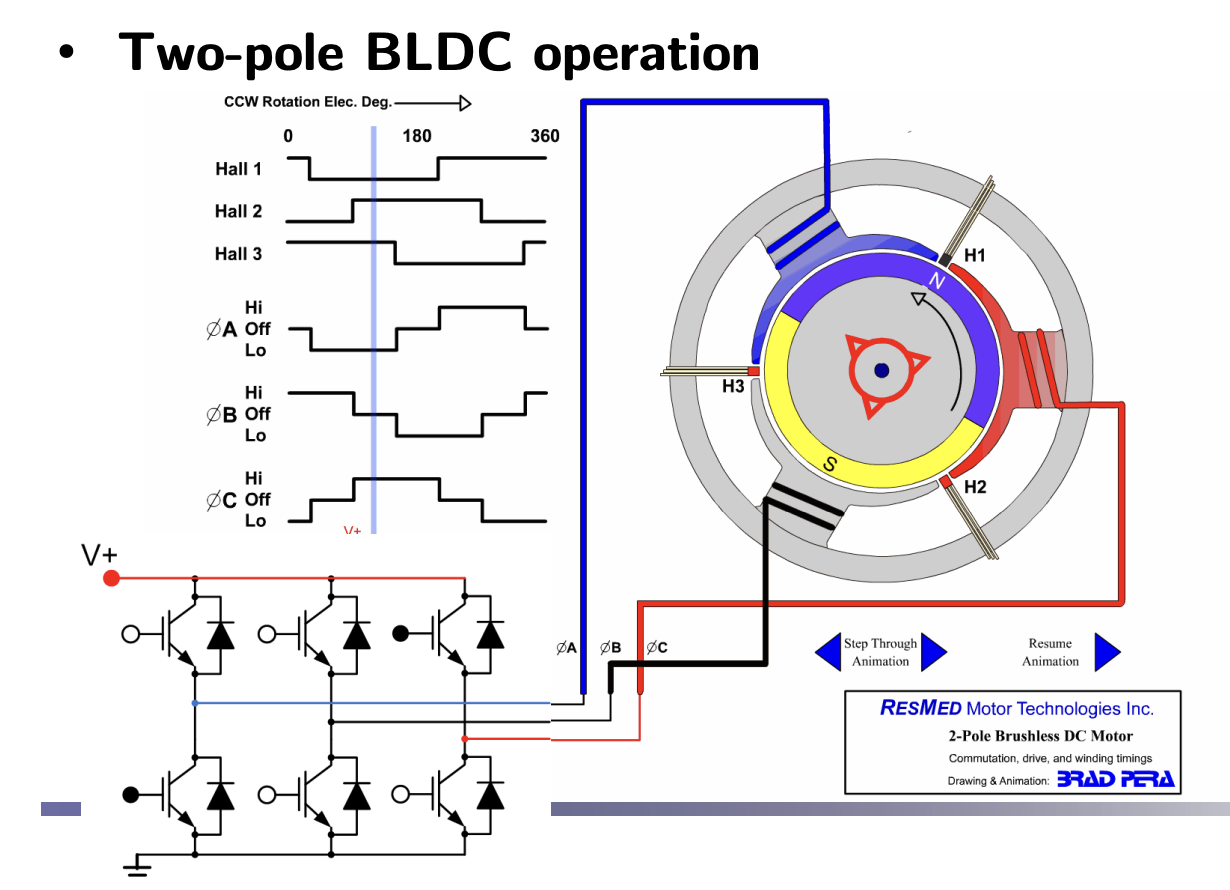
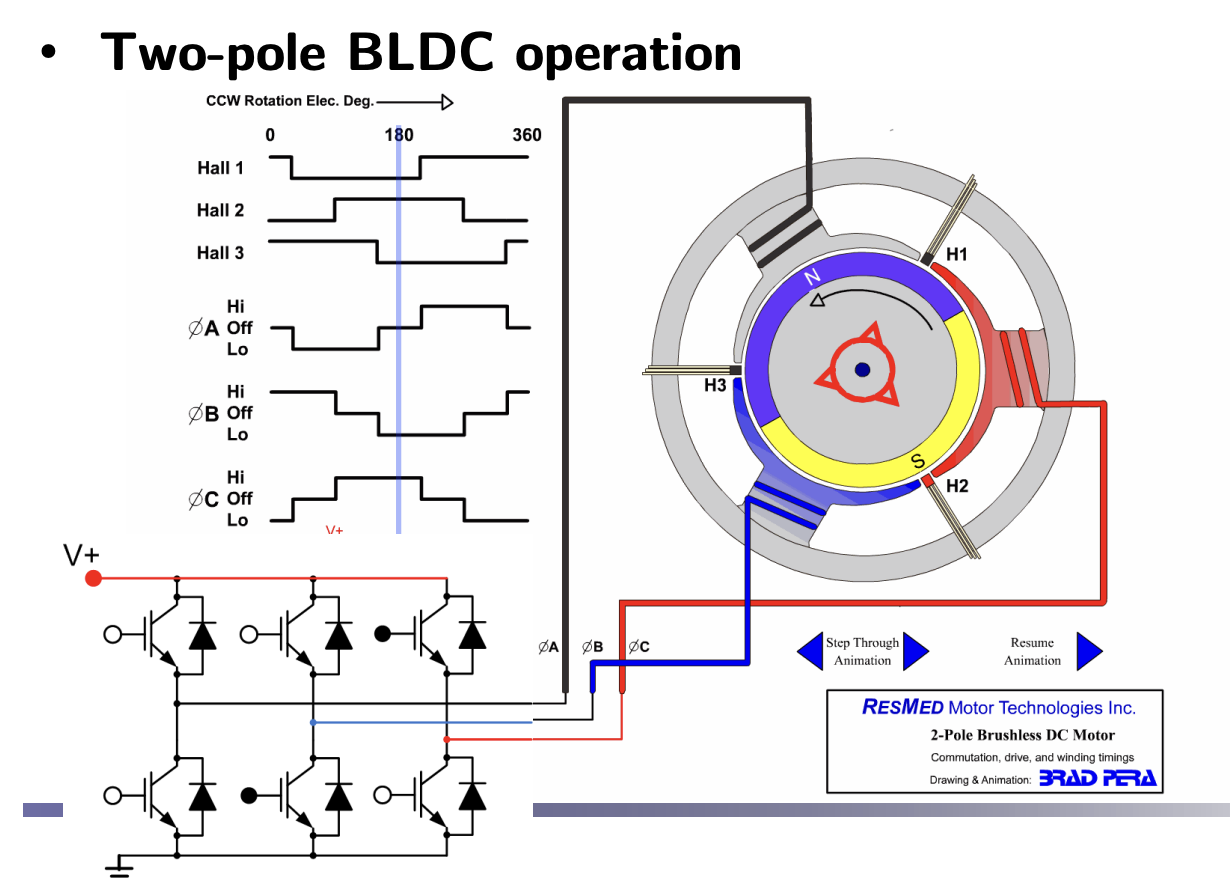
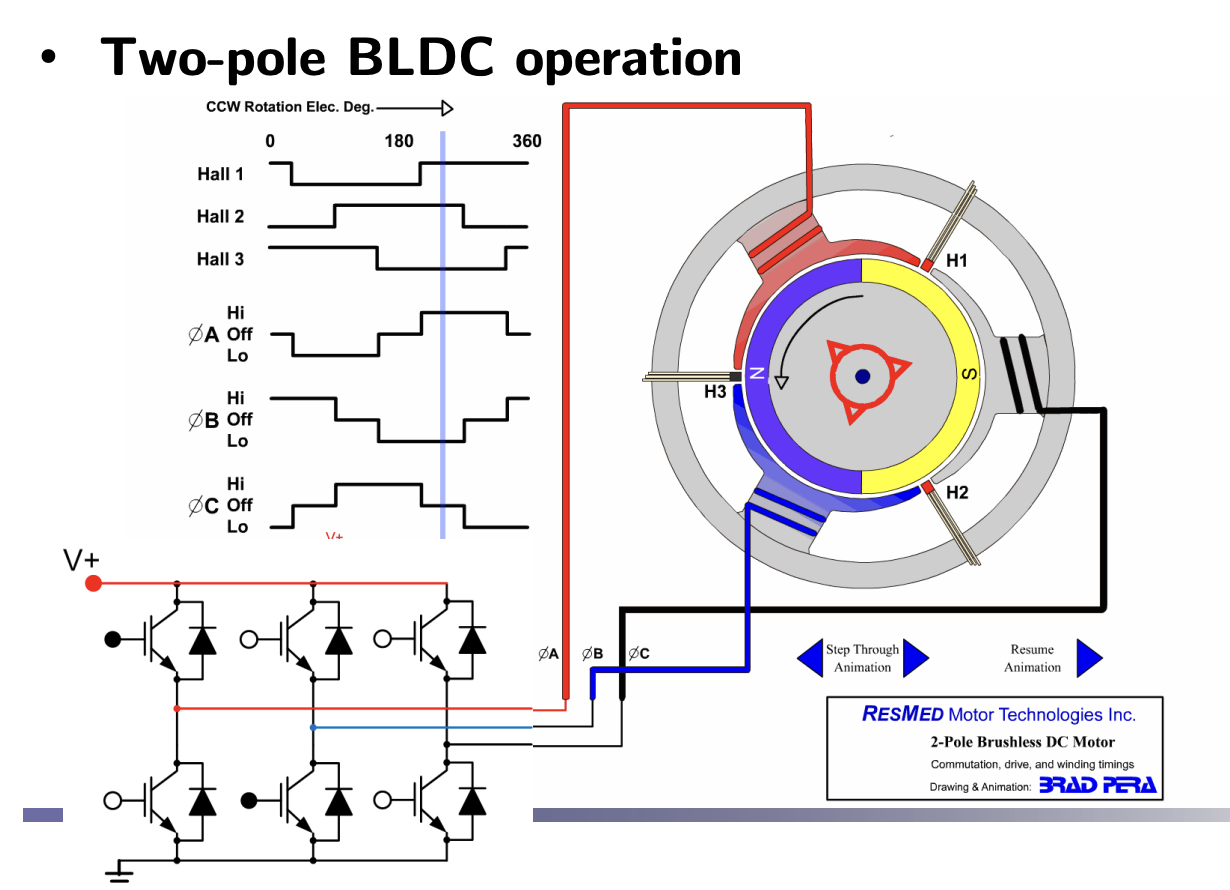
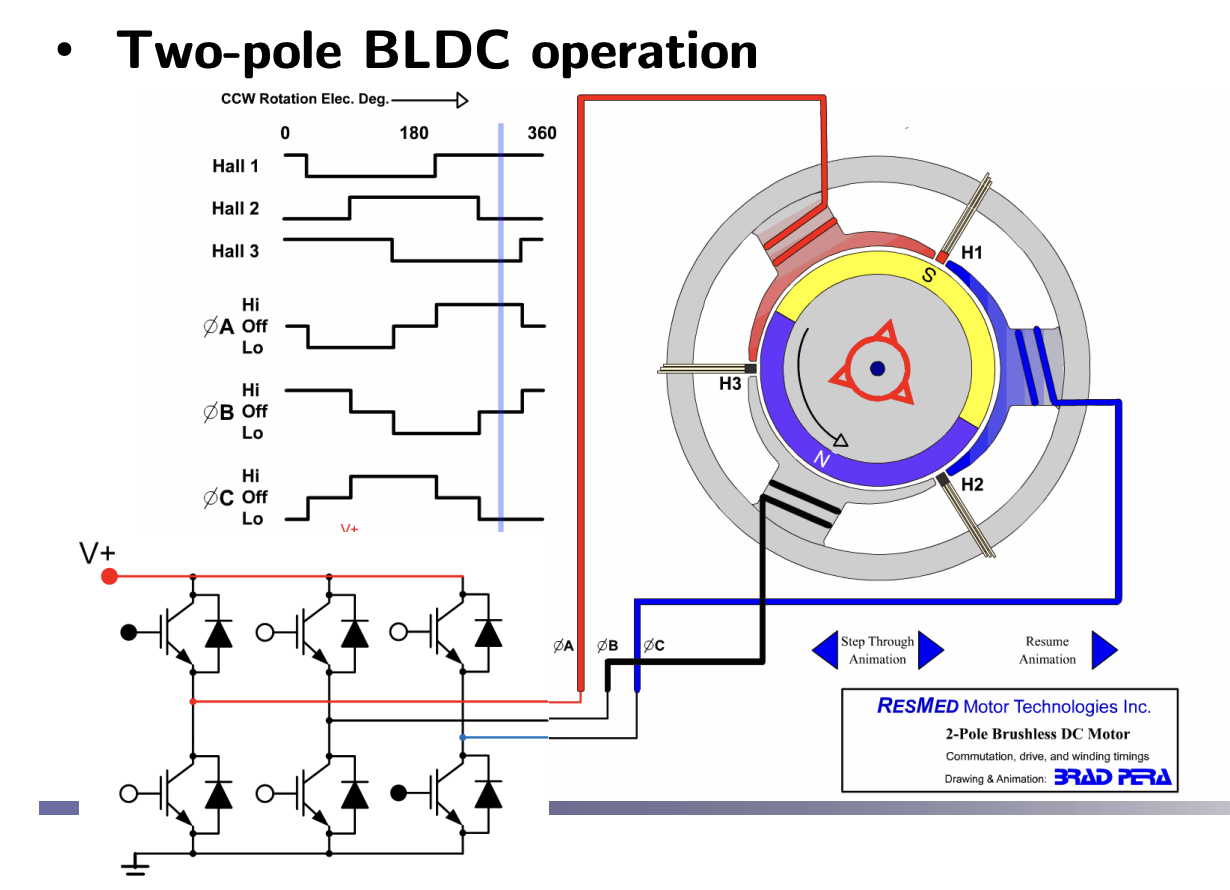
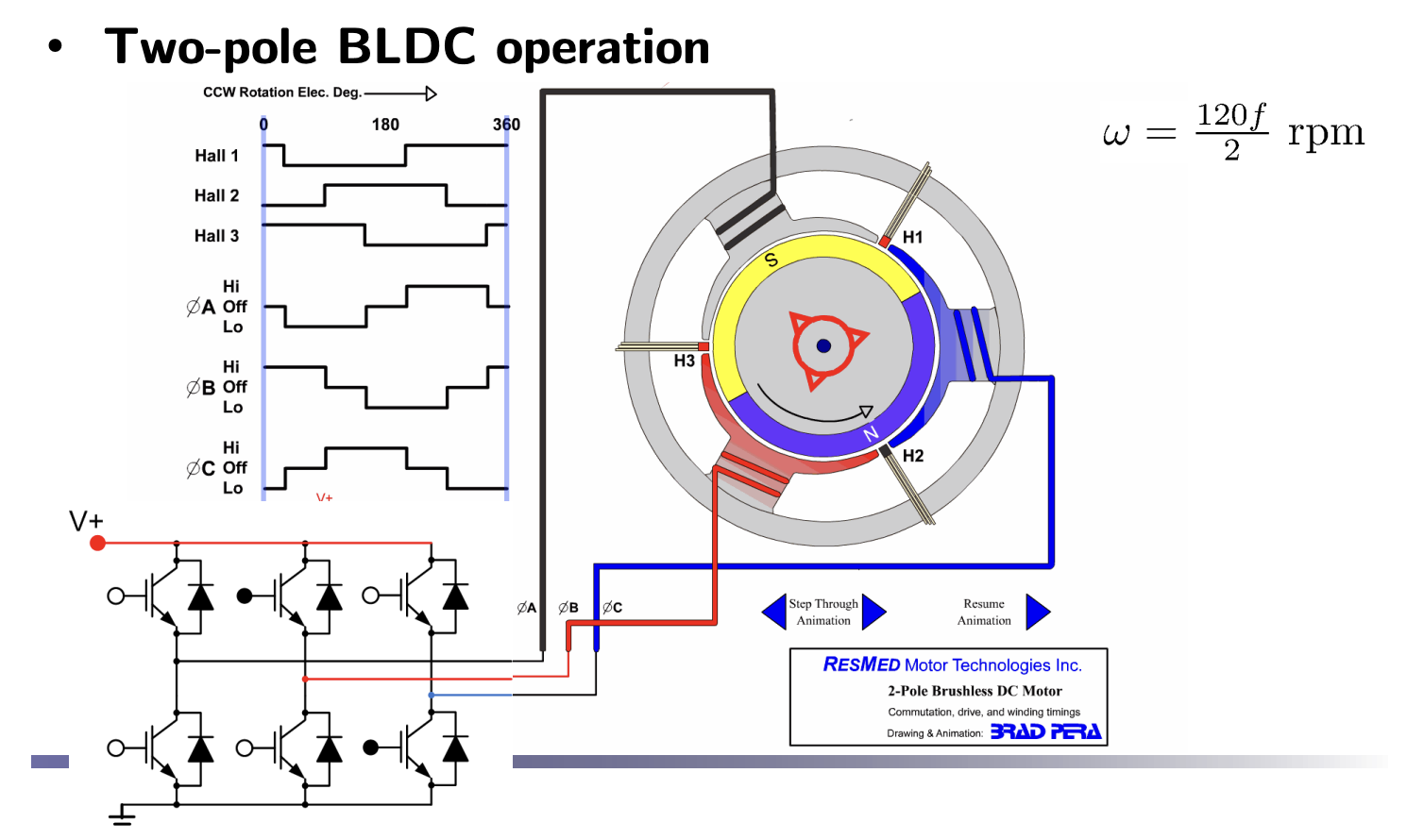
Operation of BLDC can be viewed as a series of switching actions on stator coils so that coil’s polarities match those of the rotor magnets at each instant of time.
2-Pole BLDC Operation
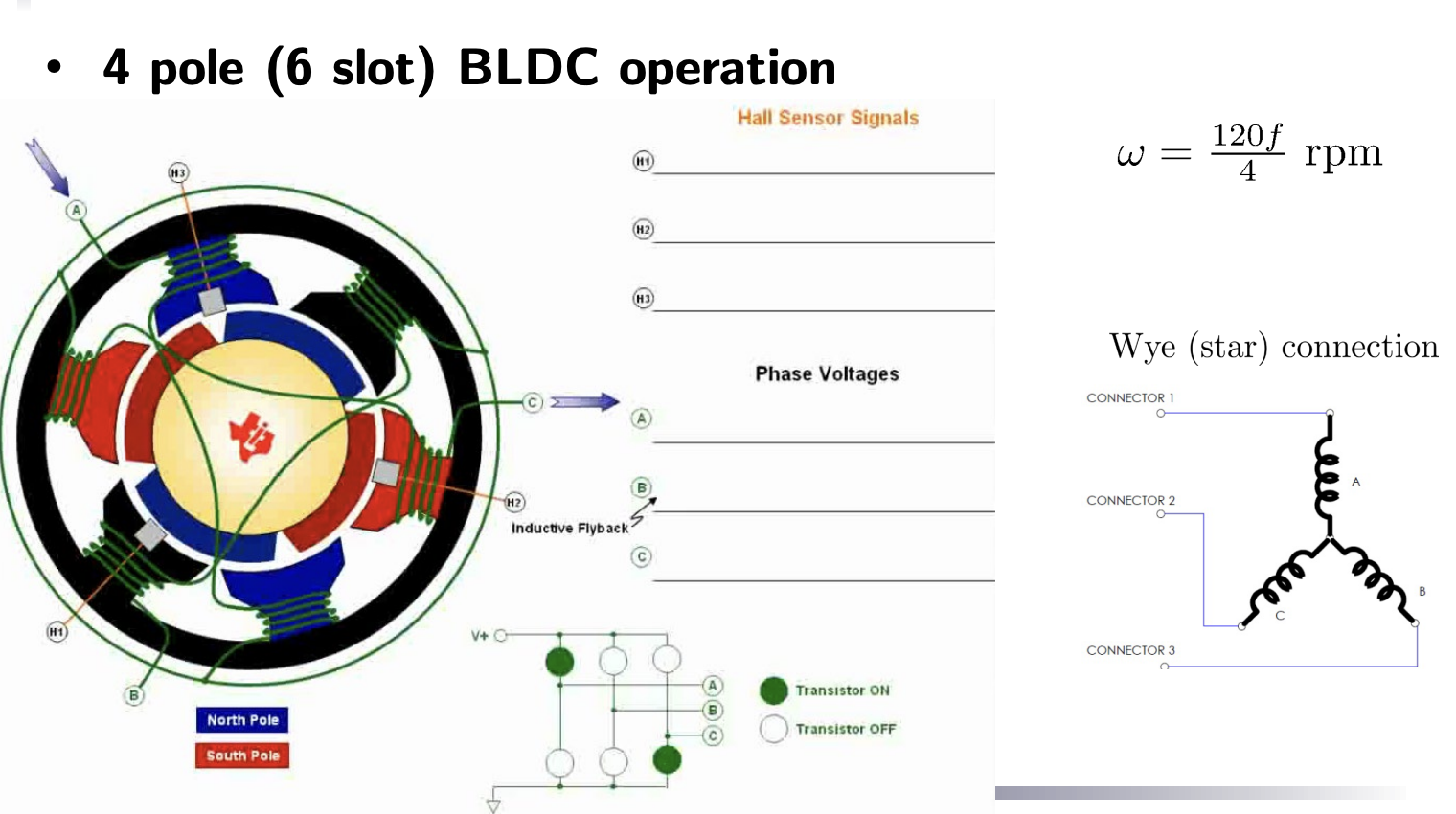
4 Pole (6 Slot) BLDC Operation
Torque-Speed Characteristics
- Torque-speed characteristics of BLDC is very similar to PMDC (because BLDC is simply inside-out of PMDC)
Notes on BLDC and PMSM
- See PMSM here
Structurally, it’s an inside-out from the brush DC motor.
- Coils make the stator while the magnet makes the rotor
- This is very good in terms of thermal performance. (i.e. cooling)
- A key idea is to do the “field switching” (commutation) electrically rather than mechanically (i.e. by brush)
These are technically AC motors running on DC power.
- Stators are very similar to - induction motor
- Rotor is “synchronized” with the stator field rotation by some kind of position sensor (hall effect sensor is widely used)
- Sensorless operation is possible; RC motors
- Can provide constant speed for any load torque and the speed can be controlled by VFD.