Consider a double integrator with a -gain:
The closed-loop transfer function is:
The characteristic equation is:
which means the closed poles are at .
This would result in:
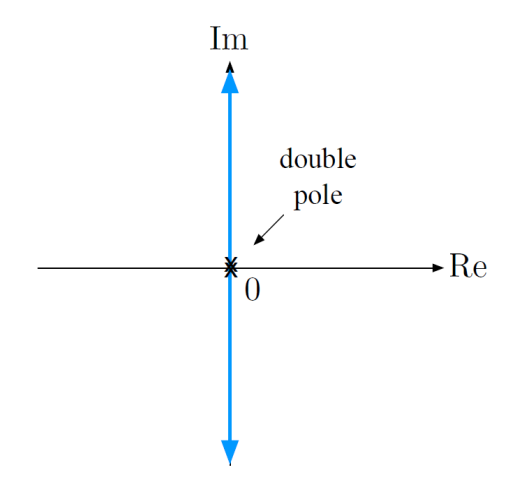
- This confirms what we already knew – -gain alone does not deliver stability.
Now consider using a PD controller instead:
Characteristic equation:
We need to convert this into the Evans form of :
which lets us have and . Assume that is fixed at 1.
Then, we have a characteristic equation of
Let’s draw the root locus using the rules:
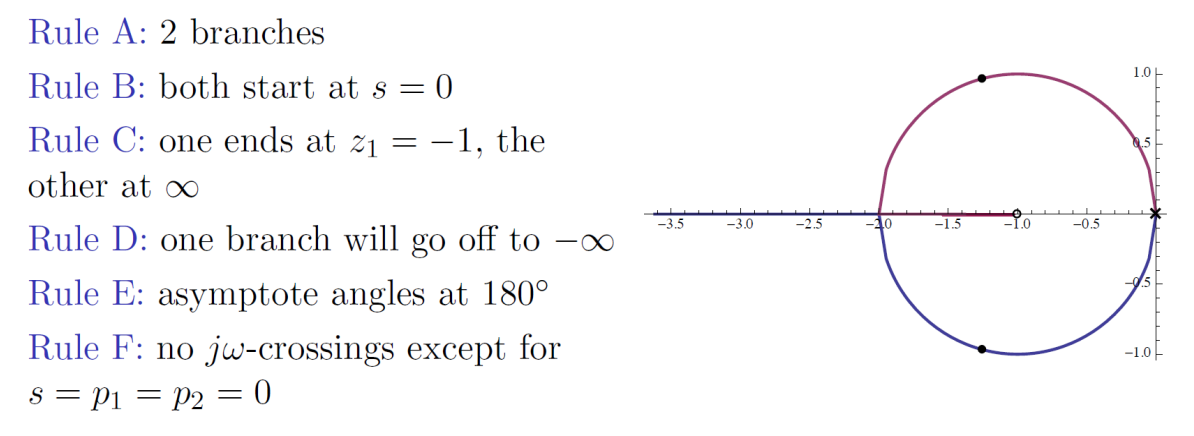
What can we conclude from this root locus about stabilization?
- All closed-loop poles are in LHP (we already knew this from Routh, but now we can visualize)
- Nice damping, so we can meet reasonable specs.