For a single link in pure rotation, the problem set-up first requires that we know:
- Angular and linear accelerations (determined through kinematic analysis)
- Mass of link
- Position information (link length, location of center of gravity)
- Mass moment of inertia with respect to center of gravity
Then, we take the following steps:
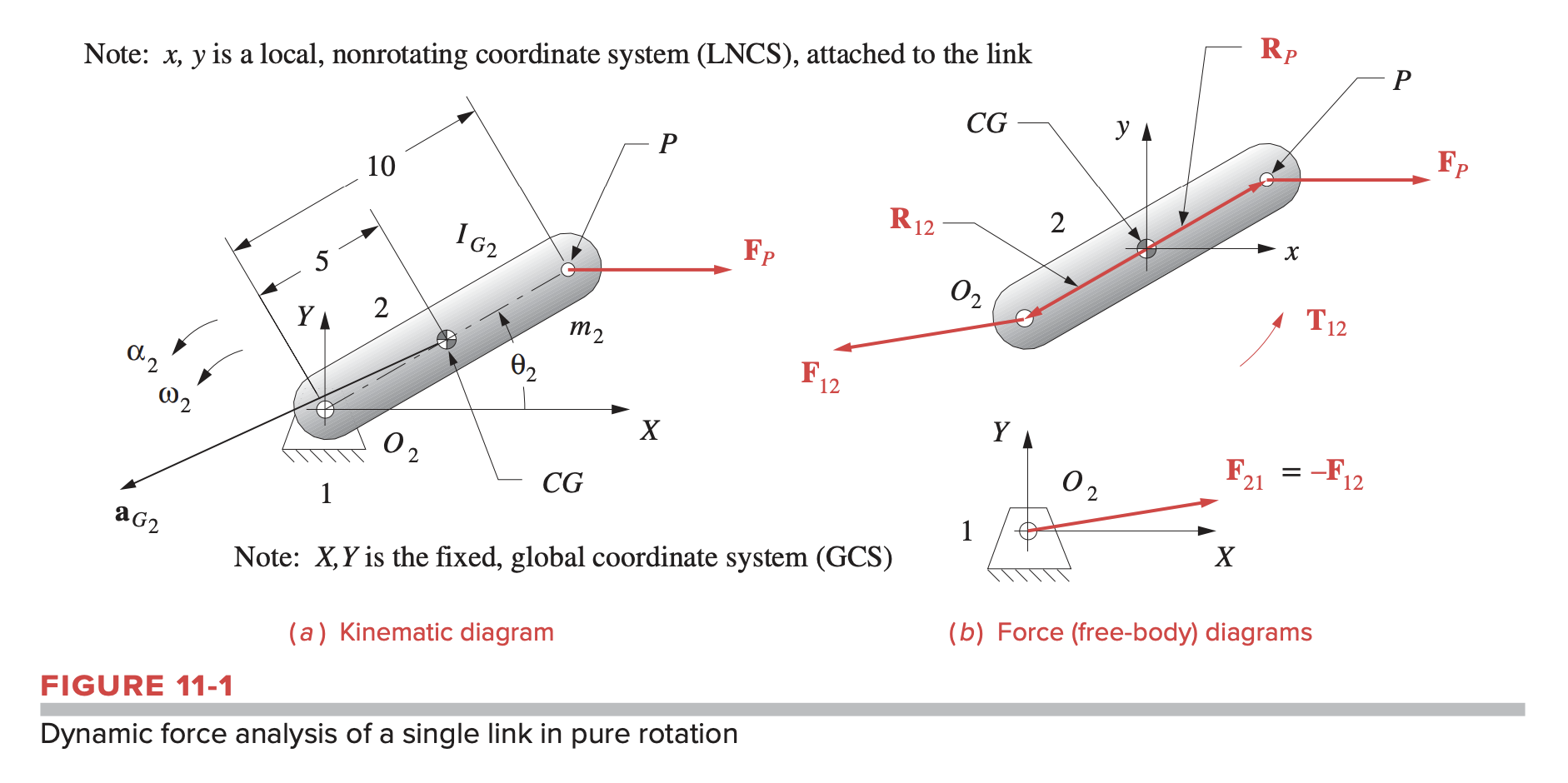
- Set-up a non-rotating, local coordinate system (LNCS) at the member’s center of gravity
- Draw a FBD
- Establish position vectors to point of application of forces with respect to local coordinate system
- Determine position components according to local coordinate system. For example, in the FBD shown above in Fig 11-1 (b) we might write find the components of as and .
Our unknowns are . We can set up a set of equations based on N2L:
Note that the is because the resultant moment acts in the -dimension.
We can then write these in scalar forms:
This can be written in matrix form as a set of simultaneous linear equations:
We can then take the inverse of this matrix to solve for the unknowns in matrix B: