For a fourbar linkage, the problem set-up first requires that we know:
- Angular and linear accelerations (determined through kinematic analysis)
- Masses of links
- Position information (link lengths, link positions, location of center of gravity for each link)
- Mass moment of inertia with respect to CG, IG, for each link
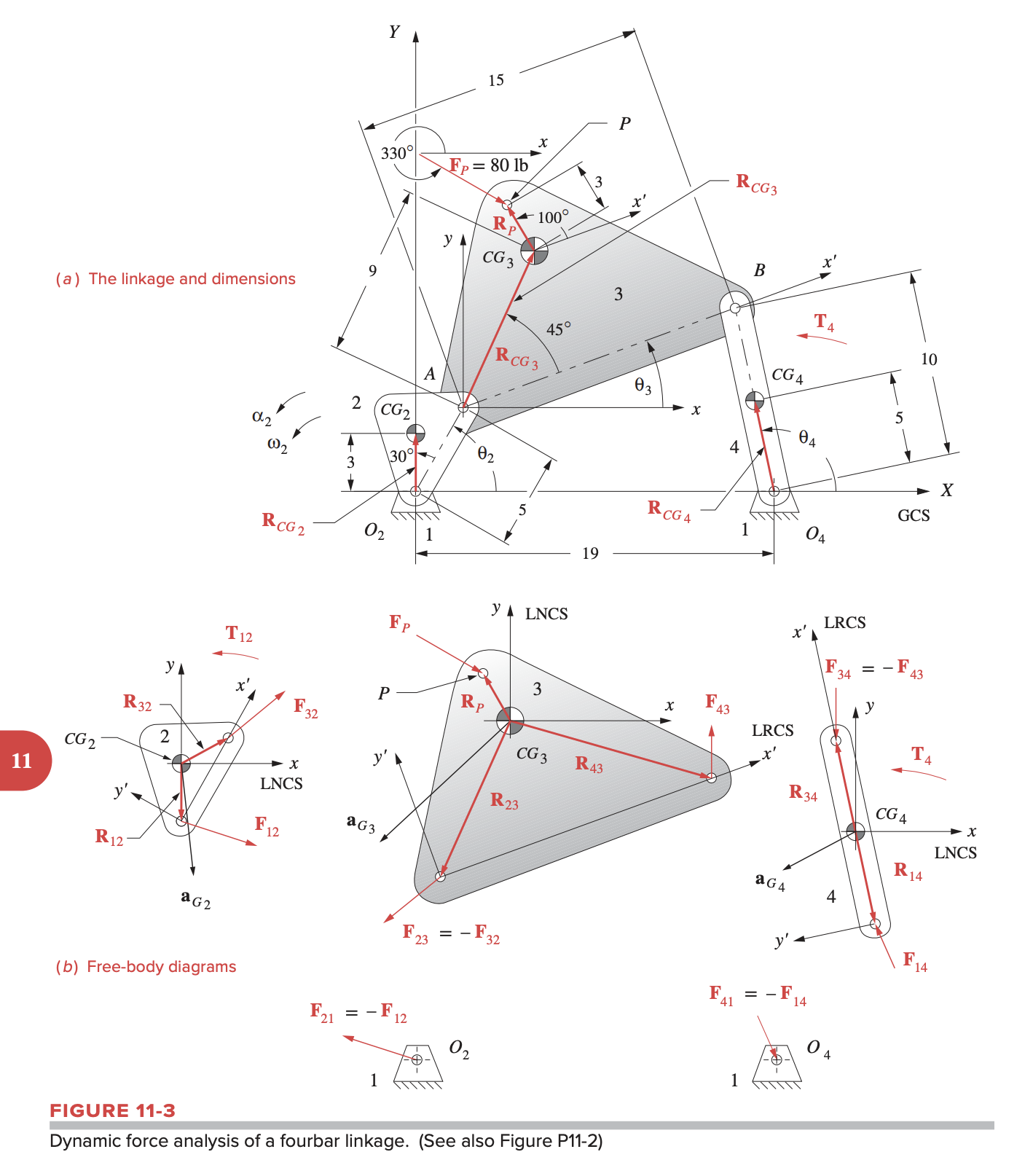
We then write out the forces and moments for each link.
Link 2:
F12xF12yT12+F32x=m2aG2x+F32y=m2aG2y+(R12xF12y−R12yF12x)+(R32xF12y−R32yF32x)=IG2α2
Link 3:
F43xF12y(R43x−F32x+FPx=m3aG3x−F32y+FPy=m3aG3yF43y−R43yF43x)+(R23xF32y−R23yF32x)+(RPxFPy−RPyFPx)=IG3α3
Link 4:
F14xF14y(R14x−F43x=m4aG4x−F43y=m4aG4yF14y−R14yF14x)−(R34xF43y−R34yF43x)+T4=IG4α4
This can be written in matrix form as a simultaneous system of equation with 9 unknowns:
10−R12y00000001R12x00000010−R32y−10R23y00001R32x0−1−R23x00000010−R43y−10R34y00001R43x0−1−R34x00000010−R14y00000001R14x001000000×F12xF12yF32xF32yF43xF43yF14yF14xT12=m2aG2xm2aG2yIG2α2m3aG3x−FPxm3aG3y−FpyIG3α3−RpxFPy+RPyFPxm4aG4xm4aG4yIG4α4−T4
[A][B]=[C]
We can then take the inverse of the matrix to solve:
[B]=[A]−1[C]