Part 1: Trajectory Analysis
Inspecting Trajectory
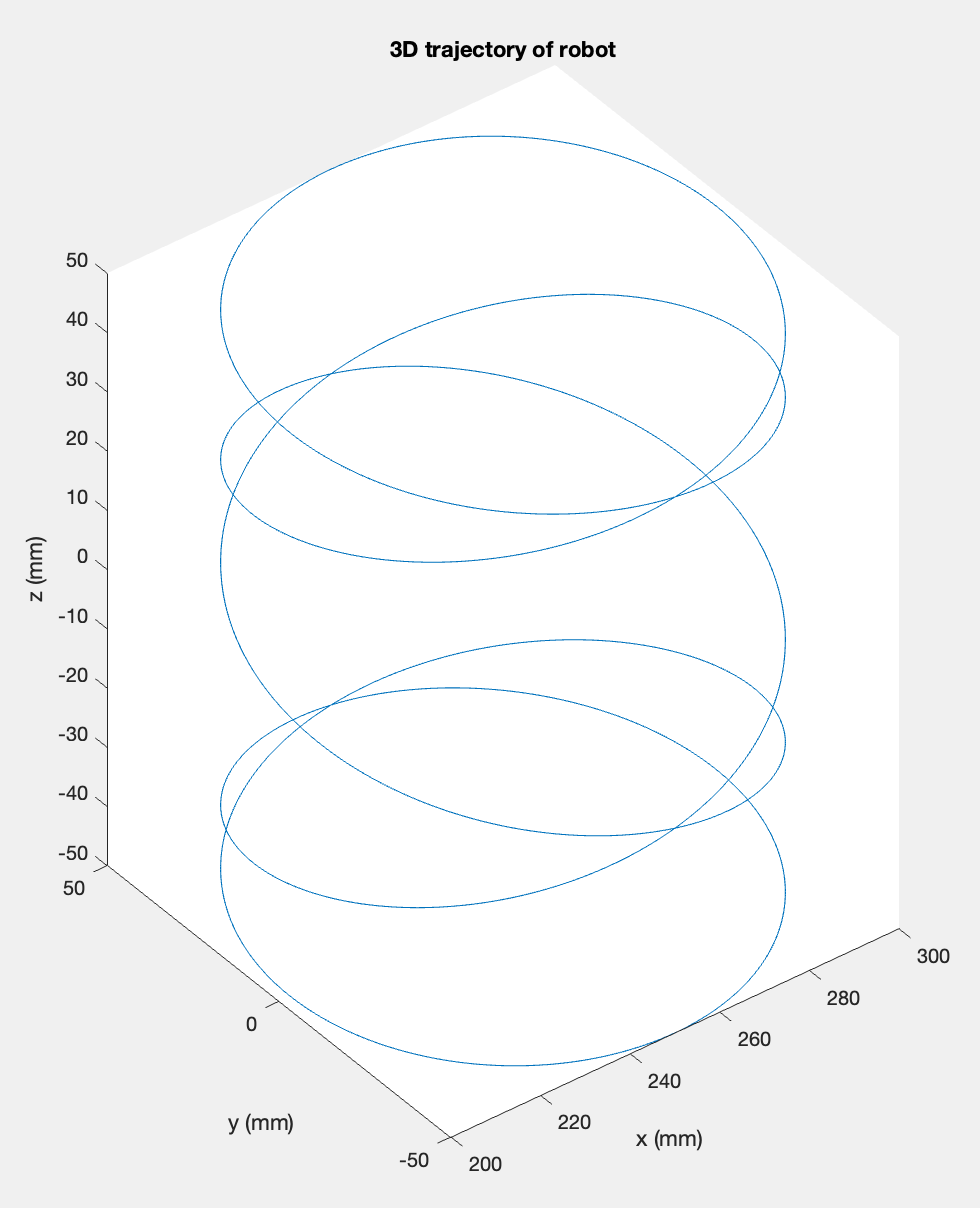
To understand the trajectory of the robot, we first plot it in 3D:
output = readmatrix("output.csv");
x = output(:, 1);
y = output(:, 2);
z = output(:, 3);
t = output(:, 4);
t_start = t(1);
t_end = t(end);
subplot(1,2,1);
plot3(x,y,z);
title("3D trajectory of robot")
xlabel("x (mm)");
ylabel("y (mm)");
zlabel("z (mm)");We can see that the the arm moves in a roughly circular fashion, but this does not provide much information other than that and are likely closely related to each other. Looking at the graph, they can be related in terms of a circle centered around with radius of apprxomiately :
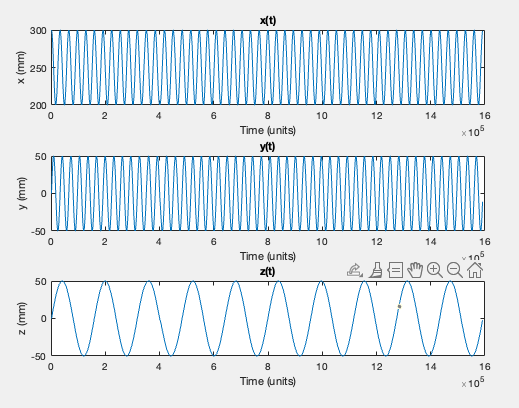
To learn more, we also plot individually:
output = readmatrix("output.csv");
x = output(:, 1);
y = output(:, 2);
z = output(:, 3);
t = output(:, 4);
t_start = t(1);
t_end = t(end);
figure;
subplot(3,1,1);
plot(t, x);
title('x(t)');
xlabel('Time (units)');
ylabel('x (mm)');
subplot(3,1,2);
plot(t, y);
title('y(t)');
xlabel('Time (units)');
ylabel('y (mm)');
subplot(3,1,3);
plot(t, z);
title('z(t)');
xlabel('Time (units)');
ylabel('z (mm)');From this, we see that the trajectory for each individual dimension appears to be periodic and resembles a sinusoid.
Curve fitting x(t)
Curve fitting y(t)
Curve fitting z(t)
Constraint Checking
- Acceleration never exceeds in any direction
- Magnitude of acceleration never exceeds
- Trajectory is infinitely differentiable
Part 2: Robot Kinematics
Forward Kinematics
Let’s summarize the given information/parameters:
- Joint controls yaw (rotation around the -axis).
- Joints and control pitch (rotation around the -axis).
- and are perpendicular to each other when they are at , such that angle is measured from the -axis.
- Link connects to and has a length of .
- Link connects to the end-effector and has a length of
- A constant offset of in the end-effector’s local frame in the positive direction.
J1 (xy direction)
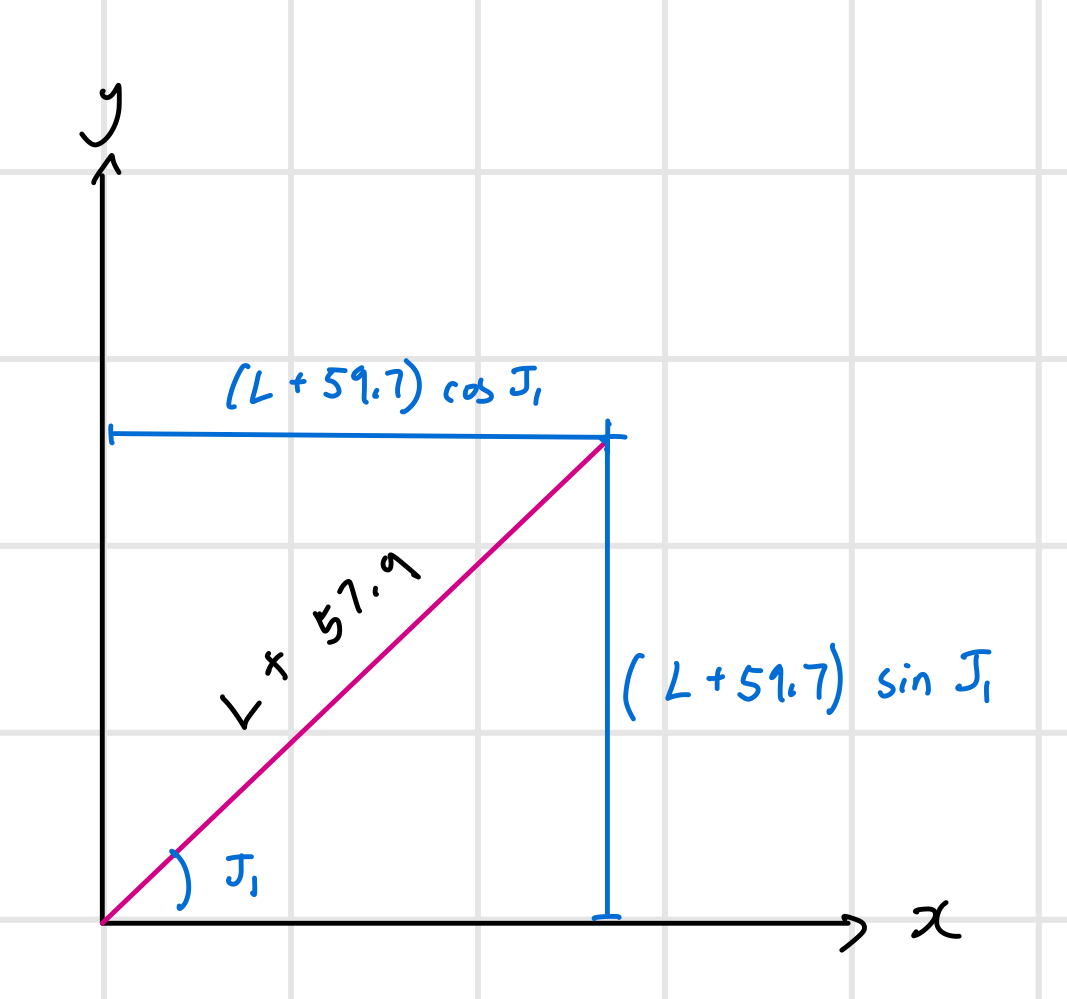
Since controls yaw (rotation around the -axis), it determines the direction of the arm in the -plane. This can be stated in terms of the unit vector which strictly describes the direction of the arm:
However, we must also take into account the offset of in the direction of . If we define the extended length of the arm (as viewed in the plane) to be , the distance reached by the robot would be . Combining this with the unit direction above, we can describe the and coordinates as:
J2 and J3 (xy magnitude and height z)
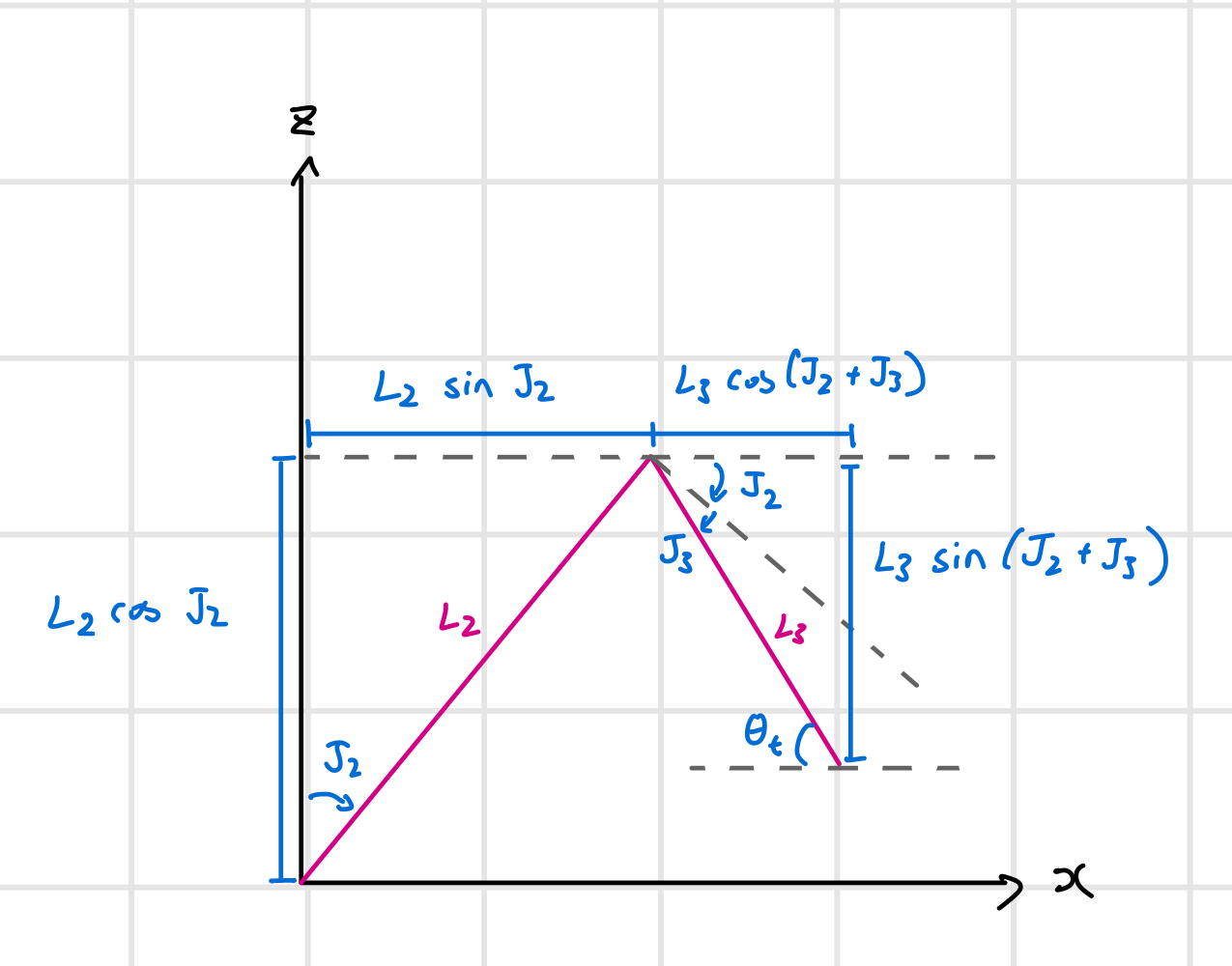
Since and control pitch (rotation around -axis), they determine the magnitude of extended length in the plane, as well as the height of the arm, . The effects of these joints can be determined in terms of the lengths of the links they control ( and ).
For link , we know that it has a length of , and is controlled by which is constrained to . Thus, we can describe its effect on and as:
Due to the constraints on , we know that these effects always hold true as the sine and cosine of will always be positive and thus contribute to and . The ellipses indicate the terms derived below that describe the effect of link on and .
For link , we know that it has a length of and is controlled by . Here, it is important that our coordinate system is defined correctly, as and form a right angle at zero position instead of being collinear. This relationship can be simplified by instead considering that the angle between and the horizontal is equal to when is zero.
We also need to consider changes to caused by changes in , such that the angle used for our trigonometric calculations of and is in fact . However, may be negative, which needs to be accounted for.
For , we use because it takes on positive values on quadrants 1 and 4, because always contributes to due to the constraint on . Thus, we have:
For , negative values of need to be added while positive values need to be subtracted from the height because the arm points down. Therefore, is used.
Combining Equations
We combine the equations for and based on with the equations for and :
Forearm angle determination
We are told that an increases in and angles result in the end-effector moving toward the table. When representing (forearm angle relative to horizontal) asa a function of and , we note that alternative interior angles must be equal to . This is shown in figure number. So we have:
Thus,
Validation
Plots
data = readmatrix("superCircleJoints.csv");
figure(1);
clf
x = data(:, 1);
y = data(:, 2);
z = data(:, 3);
j1 = data(:, 4);
j2 = data(:, 5);
theta_forearm = data(:, 6);
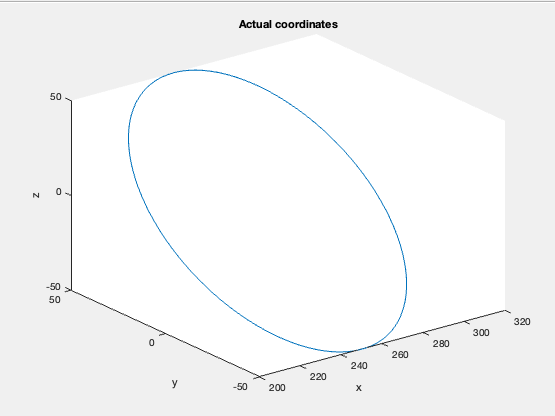
disp("Validation");
disp("Creating figures for actual and model plots");
plot3(x,y,z);
title("Actual coordinates");
xlabel("x");
ylabel("y");
zlabel("z");
%model
L = (147 .* cosd(theta_forearm)) + (135 .* sind(j2));
OFFSET = 59.7;
x_model = (L + OFFSET) .* cosd(j1);
y_model = (L + OFFSET) .* sind(j1);
z_model = (135 .* cosd(j2)) - (147 .* sind(theta_forearm));
figure(2);
clf
plot3(x_model, y_model, z_model);
title("Model coordinates");
xlabel("x");
ylabel("y");
zlabel("z");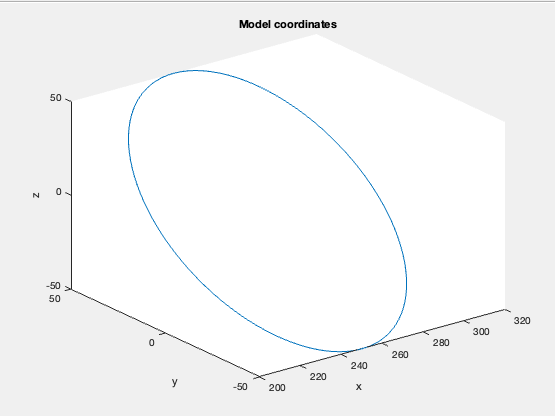
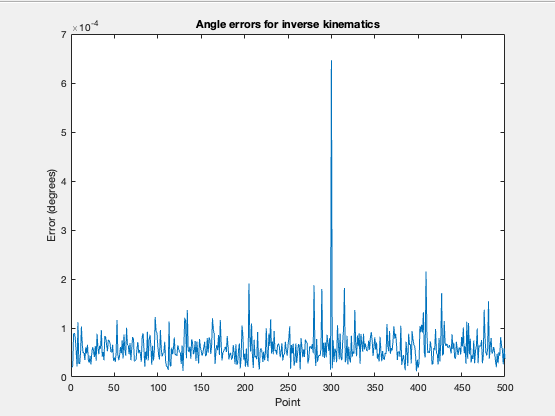
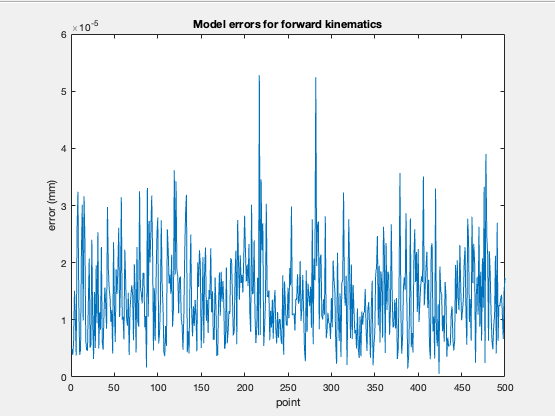
Error calculations:
% error calculations
x_errors = abs(x - x_model);
y_errors = abs(y - y_model);
z_errors = abs(z - z_model);
total_errors = hypot(x_errors, hypot(y_errors, z_errors));
total_max_e = max(total_errors);
total_min_e = min(total_errors);
disp(['max magnitude error ' num2str(total_max_e) ' mm'])
disp(['min magnitude error ' num2str(total_min_e) ' mm'])
rmse_total = sqrt(mean(total_errors.^2));
disp(['rmse total error ' num2str(rmse_total) ' mm'])
max magnitude error 5.2771e-05 mm
min magnitude error 5.6389e-07 mm
rmse total error 1.6182e-05 mmError plot:
Inverse Kinematics
To formulate an optimization
% calculating the constraints
min_theta = -10;
max_theta = 100;
min_j2 = 0;
max_j2 = 85;
% assume angle constraint from diagram is for theta forearm
min_j3 = min_theta - max_j2;
max_j3 = max_theta - min_j2;
% functions must be defined at bottom of file
function normal_distance = inverse_kinematics(p_r, p_d)
j1 = p_r(1);
j2 = p_r(2);
j3 = p_r(3);
x = p_d(1);
y = p_d(2);
z = p_d(3);
theta_forearm = j2 + j3;
l = (147 * cosd(theta_forearm)) + (135 * sind(j2));
OFFSET = 59.7;
x_model = (l + OFFSET) * cosd(j1);
y_model = (l + OFFSET) * sind(j1);
z_model = (135 * cosd(j2)) - (147 * sind(theta_forearm));
x_diff = abs(x_model - x);
y_diff = abs(y_model - y);
z_diff = abs(z_model - z);
normal_distance = hypot(x_diff, hypot(y_diff, z_diff));
end