Recall the basic state update equation. We can re-write it in a form to emphasize its role in weighing the previous estimate and the current measurement:
As we can see from above, the Kalman Gain is the measurement weight, and the is the weight of the current state estimate.
Recall that is calculated as:
Thus, is close to zero when the measurement uncertainty is high and the estimate uncertainty is low. Hence we give a significant weight to the estimate and a small weight to the measurement.
On the other hand, when the measurement uncertainty is low, and the estimate uncertainty is high, is close to one. Hence we give a low weight to the estimate and a significant weight to the measurement.
If the measurement uncertainty equals the estimate uncertainty, then . The Kalman Gain defines the measurement’s weight and the prior estimate’s weight when forming a new estimate. It tells us how much the measurement changes the estimate.
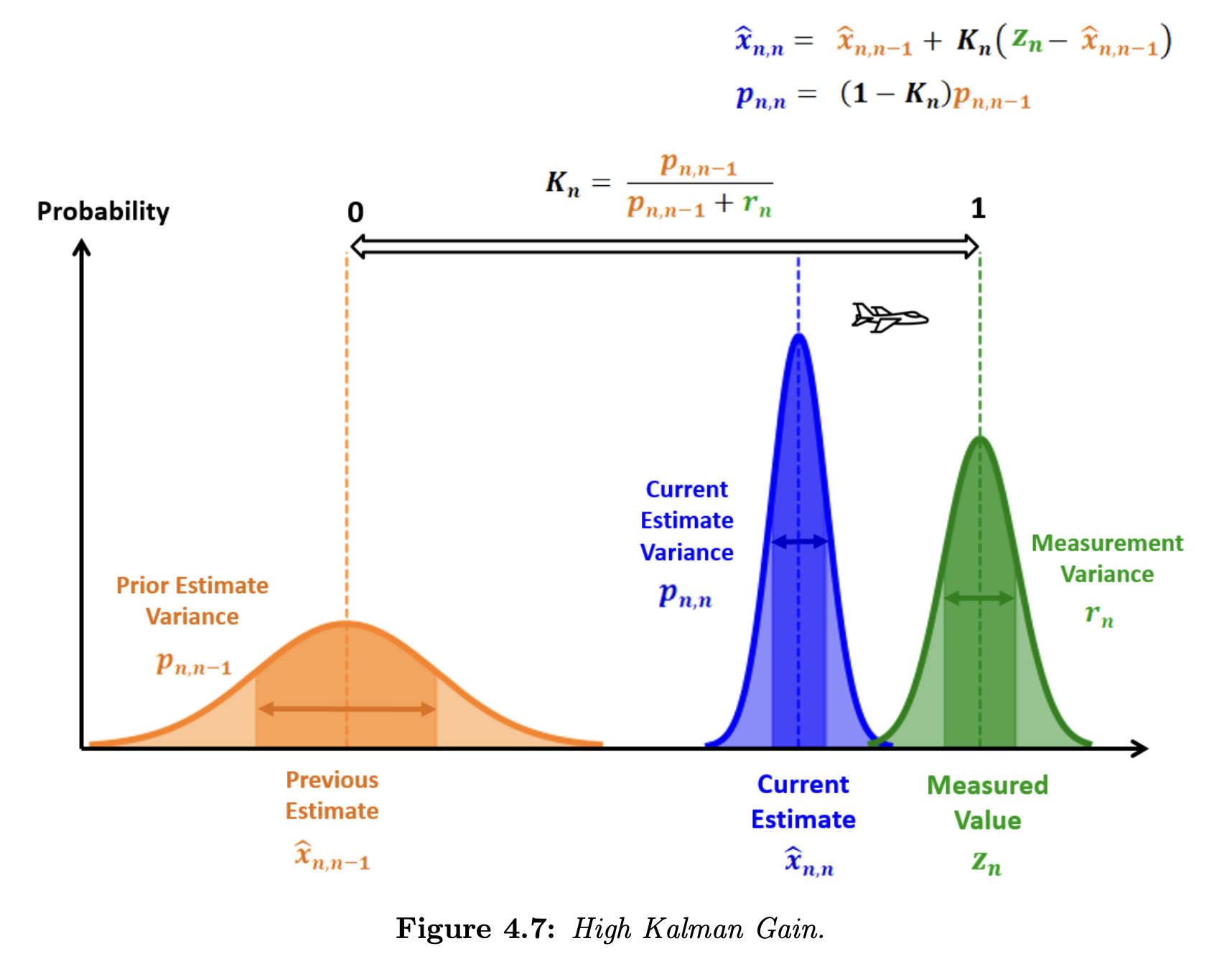
High Kalman Gain
A low measurement uncertainty relative to the estimate uncertainty would result in a high Kalman Gain (close to 1). Therefore the new estimate would be close to the measurement. The following figure illustrates the influence of a high Kalman Gain on the estimate in an aircraft tracking application.
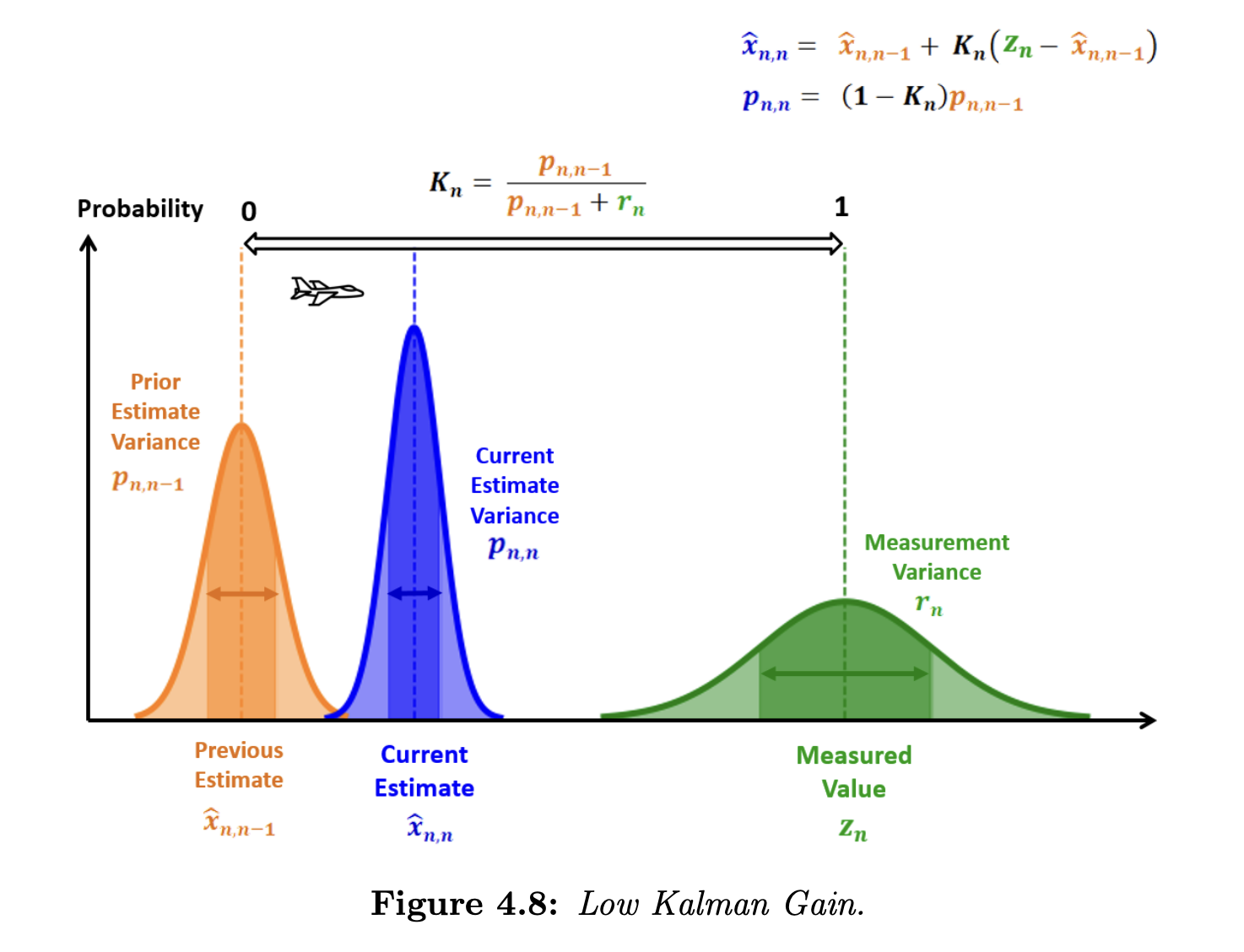
Low Kalman Gain
A high measurement uncertainty relative to the estimate uncertainty would result in a low Kalman Gain (close to 0). Therefore the new estimate would be close to the prior estimate. The following figure illustrates the influence of a low Kalman Gain on the estimate in an aircraft tracking application.