Control problems are attractive for GP because the controller is naturally a program. A controller maps state to action:
Thus, we can use GP to evolve threshold logic, arithmetic combinations of sensor readings, nonlinear feedback laws, and conditional policies.
Consider the classic cartpole problem:
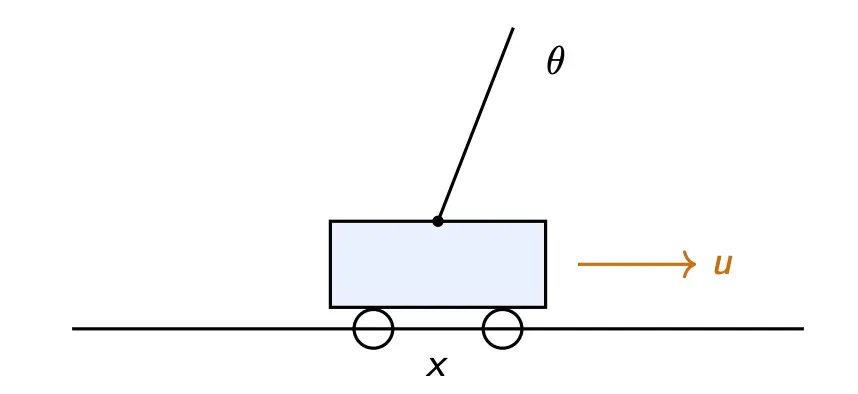
Failure occurs if or . Basically, the pole must stay near upright and within the track.
The state is:
GP evolves a controller of the form:
We can have the output either be a discrete force , or a continuous form in a bounded interval.
We can then define a survival-based fitness:
or a reward-based fitness:
where we are basically rewarding 1 for each step staying alive, with penalties for large angles and displacements. This encourages both stability and control stability.
Control is a hard problem!