Visual odometry estimates the motion of a camera over time by tracking how feature points move between frames.
We want to write the epipolar constraint between the two views, and determine how many matched points are required to solve for.
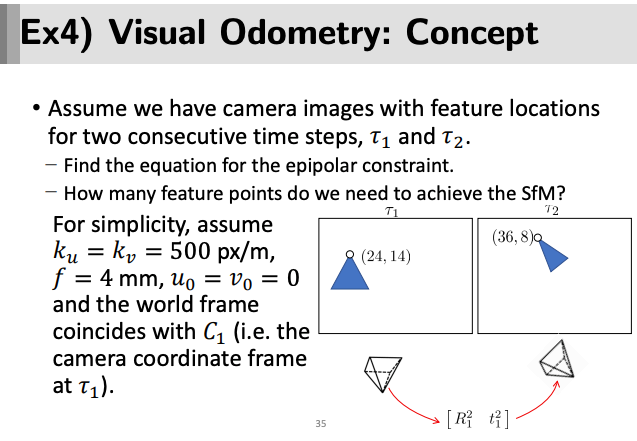
Camera intrinsics:
Since is considered to be in world frame, we have .
Note that we have
Converting to normalized image coordinates:
Then, the epipolar constraint is:
This is one linear equation in the nine entries of . If we write as:
and substituting gives a single linear constraint:
Typically, to solve this we need 8 points (Eight-Point Algorithm). Taking advantage of other constraints (on , etc.), this can be reduced to five points (Five-Point Algorithm).