Continuous-time and discrete-time feedback control systems take the following general forms:
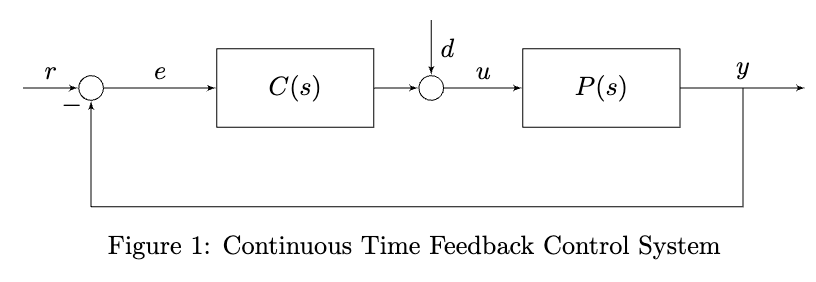
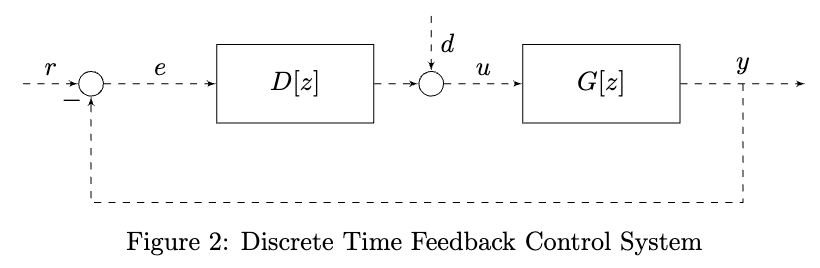
The systems have many different transfer functions. To distinguish these, we make the distinction between external and internal signals:
- External signals: – we have no control over these
- Internal signals: – these depend on our control design
We consider transfer functions from external signals to internal signals (closed-loop transfer functions):
- We consider external-to-internal TFs because our goal is to understand the influence of external factors on the internals of our system
Example:
We can generalize these in matrix form for both continuous and discrete time:
Well-posed
A feedback system is well-posed if all closed-loop transfer function from external signals to internal signals are real, rational, and proper.
Closed-loop stable / Internally stable
A closed-loop system is closed-loop stable or internally stable if all closed-loop transfer functions from external signals to internal signals are BIBO stable.