Stabilizing controller design: Given the plant , design the controller so that the closed-loop system is internally stable.
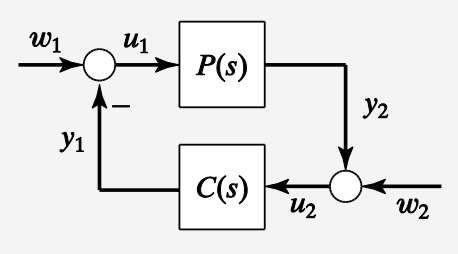
The idea of pole placement is to design so that the poles closed-loop system are the roots of the characteristic polynomial, such that the roots of the closed-loop characteristic polynomial are placed in the pre-specified desirable location.
Proper Controllers
Let a plant be given by
where and are coprime.
Consider proper controllers:
where and are coprime.
The closed-loop characteristic polynomial is
Given and unknown , it is also called the polynomial Diophantine equation.
Stabilizing controller design:
- Specify an th order desired stable .
- Choose and so that the Diophantine equation is satisfied.
- Set .
Define two Toeplitz matrices: