See:
- EMF Generation with Conductor Relative Motion
- Generation of Force with Conductor in a Magnetic Field
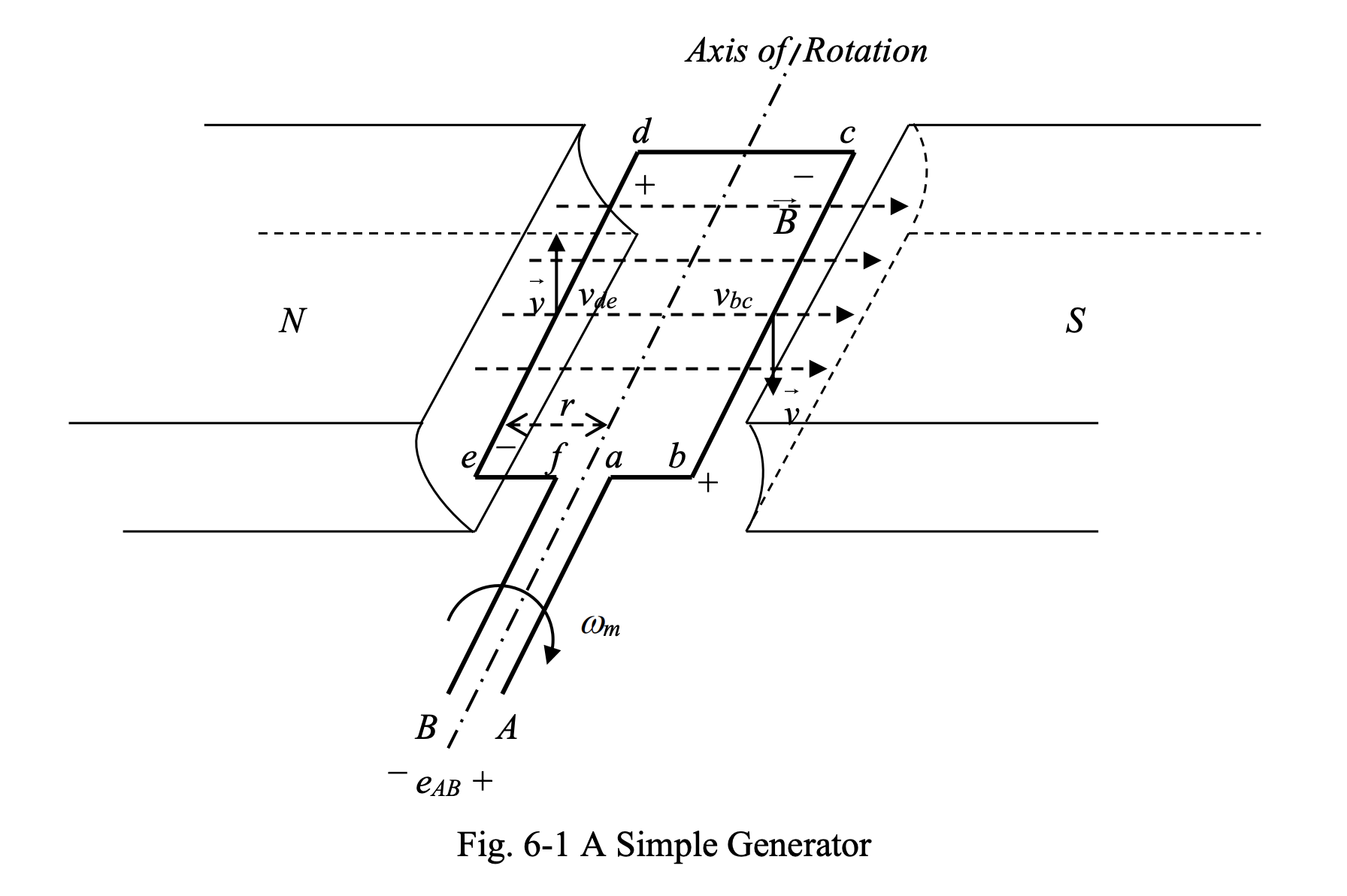
To explain the structure and operation of DC machines, let’s consider a loop of wire rotating about its axis in a constant uniform magnetic field produced by a permanent magnet, as shown in Fig. 6-1.
In any arbitrary position of the loop, the emf is induced in different segments of the loop of wire can be found by:
where are the vectors of linear speed, magnetic flux density and length of conductor. Note that the magnitude of is equal to the length of the conductor and its direction is such that it makes an angle between and with . If is collinear with , simplifies to:
Also, if , , and . This is the largest emf that can be induced in a conductor of length , when moving at the velocity of in a magnetic field of magnetic flux density .
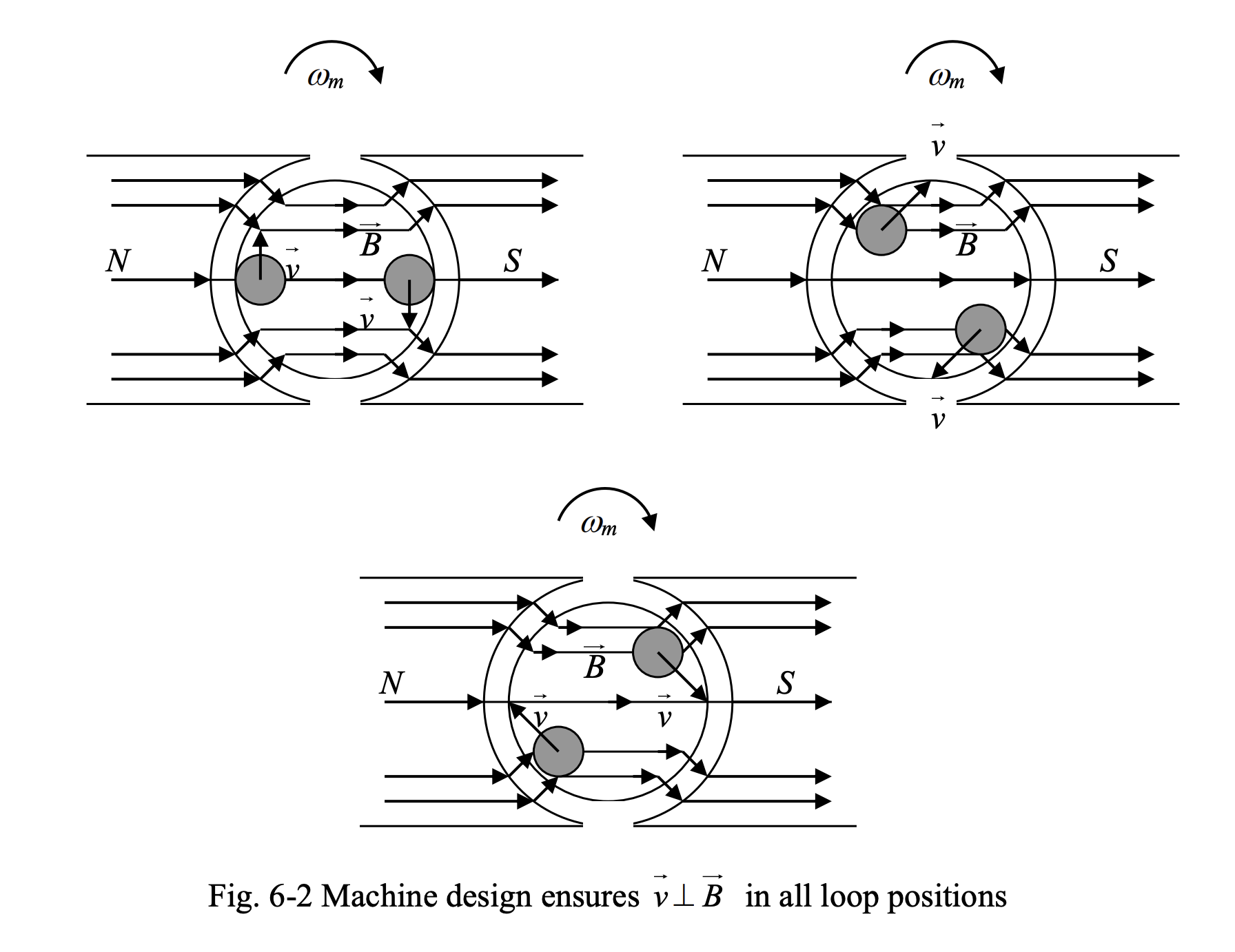
The practical electric machines are designed such that at almost all possible positions of the loop. This is accomplished by giving the pole faces a circular shape, as shown in Fig. 6-2, and reducing the time period during which the loop is not under the pole faces to a minimum. Also, we try to make collinear with for the segments of the loop participating in voltage generation. This ensures the best utilization of the installed capacity of the machine.
Segment EMFs
We can find the induced emfs in different segments of the loop shown in Fig. 6-1.
- ab, ef, cd: For these conductor segments, . thus .
- bc: For conductor segment bc, and is collinear with . Therefore, as long as the loop side bc is under the S pole face, we have:
- de: For conductor segment de, and is collinear with . Therefore, as in the case of segment bc, as long as the loop side de is under the N pole face, we have:
As a result, the total emf in the loop will be:
If , then:
The voltage given corresponds to the loop position illustrated in Fig 6-1.
As the loop rotates, for half a revolution, or :
- bc is under the face of the south pole
- de is under the face of the north pole,
- .
Thus, it can be concluded that the output voltage will have a constant value of for as long as the situation is as described above.
When the loop sides leave the pole faces, and make an angle of and , and thus, . Therefore, beyond pole faces, we have:
During the next half revolution or , when the loop side bc will be under the face of the north pole and the loop side de under the face of the south pole, as shown in Fig. 6-3.
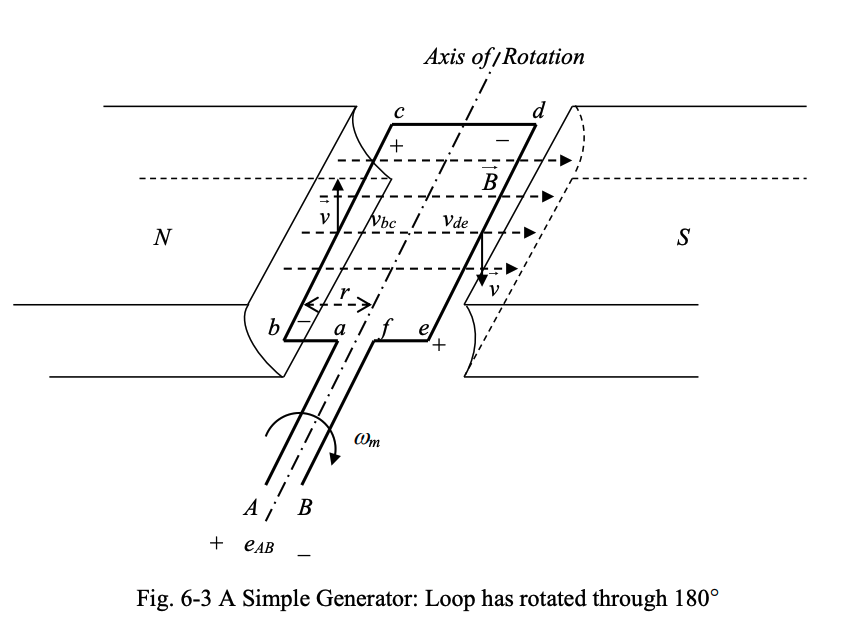
The emfs induced in the loop sides bc and de will change polarity, while keeping the same magnitude. This is because the angle between and changes sign from to . For ab, cd and ef segments, we again have , and thus, . Therefore, during the second half of a revolution, we have:
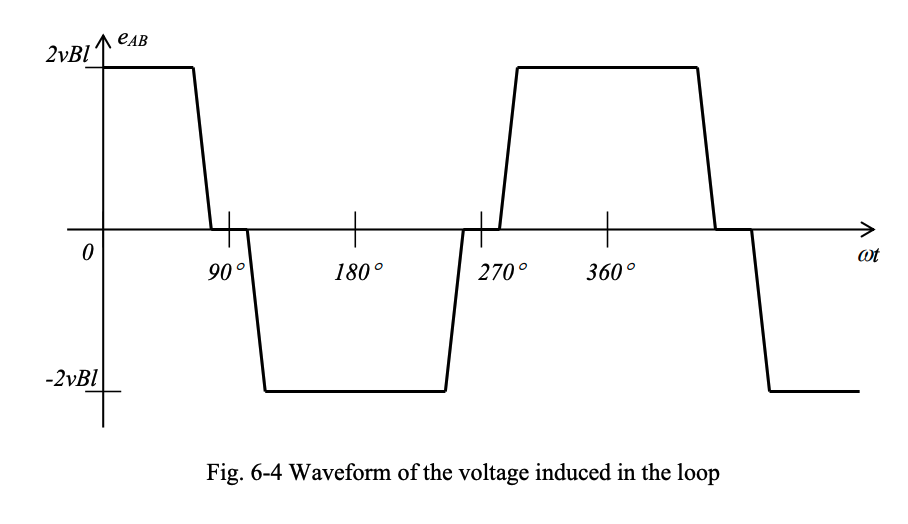
The waveform on the induced emf in the loop will look like that shown below in Fig. 6-4. Note that is either at or , with a quick transition between the two levels and a short period at zero, since the loop sides leave the pole faces for only a very short period of time during each revolution.
We can also re-write the above equations by expressing linear speed in terms of rotational speed, such that:
where is the radius of the loop and is the angular speed in radians per second. can be written as:
where is speed in RPM. Therefore,
and
In the above equation, is the area of each pole face, assuming that the length of the air gap between the rotating part (rotor) and stationary part (stator) is negligible compared with other dimensions of the machine. is half of the surface area of a sylinder of radius and length , or . We also replaced with .