Outer loop sampling time
Plant:
W:

X:

So D = W/X:
NOTE
Yes, I can walk you through exactly how to go from those W and X to a controller
D(z) = \frac{W(z)}{X(z)}
and then into the polynomial / tf(‘z^-1’) form.
1. Write W and X explicitly
From your MATLAB output: W:
X:
Both are discrete-time, sample time 0.2 s, zpk models.
2. Form the controller D = W/X By definition:
But here , so they cancel, and you also have a common (z-1)^2 that cancels:
That’s your controller in factored z-form.
In MATLAB, you can literally do:
D = minreal(W / X); % zpk controller zpk(D) % to see the same factorized form3. Expand to numerator & denominator polynomials in z
Now expand the polynomials (I’ve done the algebra for you): Numerator N(z)
Expanding gives:
Denominator D(z)
Expanding gives:
D(z) = z^5 - 2.3607,z^4 + 2.29811242,z^3 - 1.16099381228,z^2 + 0.285702098583,z - 0.0349486756704.
So as a transfer function in powers of z:
D(z) = \frac{-4.3847 z^4 + 10.29922183 z^3 - 9.04347049667 z^2 + 4.138379743466 z - 1.033698812804} {z^5 - 2.3607 z^4 + 2.29811242 z^3 - 1.16099381228 z^2 + 0.285702098583 z - 0.0349486756704}.
In MATLAB:
num_z = [-4.3847, 10.29922183, -9.04347049667, 4.138379743466, -1.033698812804]; den_z = [1, -2.3607, 2.29811242, -1.16099381228, 0.285702098583, -0.0349486756704]; Dz = tf(num_z, den_z, 0.2); % variable is z (implicitly)
4. Convert to z^{-1} form for
tf(‘z^-1’)
Simulink’s Discrete Transfer Fcn (with ‘variable’,‘z^-1’) wants polynomials in z^{-1}:
D(z) = \frac{a_0 + a_1 z^{-1} + \dots + a_m z^{-m}} {b_0 + b_1 z^{-1} + \dots + b_n z^{-n}}.
If the polynomial in z is
numerator: n_0 z^4 + n_1 z^3 + \dots + n_4
denominator: d_0 z^5 + d_1 z^4 + \dots + d_5,
then the coefficients in z^{-1} order are just the reversed vectors:
numerator in z^{-1}: [n_4, n_3, n_2, n_1, n_0]
denominator in z^{-1}: [d_5, d_4, d_3, d_2, d_1, d_0]
So for your controller:
num_z = [-4.3847, 10.29922183, -9.04347049667, ... 4.138379743466, -1.033698812804]; den_z = [ 1.0, -2.3607, 2.29811242, ... -1.16099381228, 0.285702098583, -0.0349486756704]; % Reverse to get z^-1 coefficients aD = fliplr(num_z); bD = fliplr(den_z);Numerically (rounded a bit):
aD = [-1.033699, 4.138380, -9.043470, 10.299222, -4.384700]; bD = [-0.034949, 0.285702, -1.160994, 2.298112, -2.360700, 1.000000]; Dz_inv = tf(aD, bD, 0.2, 'variable', 'z^-1');Now Dz_inv is exactly the same controller as D = W/X, but in the form you can drop directly into a Discrete Transfer Fcn block (or use in your MATLAB code the same way you’ve been doing for Dzinv_outer/Dzinv_inner.
Summary of the process
Start from zpk forms of W and X.
Form the controller: D = minreal(W/X);.
Either:
Use zpk(D) to see factored form, or
Use tf(D) → tfdata to get polynomial in z, then reverse the coefficient vectors to get z^{-1} form.
Use those reversed coefficients in tf(…,‘variable’,‘z^-1’).
If you paste your actual MATLAB variables for W and X, I can write the exact 3–4 lines you’d run to get D in the same style as your existing lab code.
7-pole Solution
12-pole Solution
T = 0.25
T = 0.25;
realWPoles = [0.9];
complexWPoles = generate_poles(10, 0.4, 0.5);
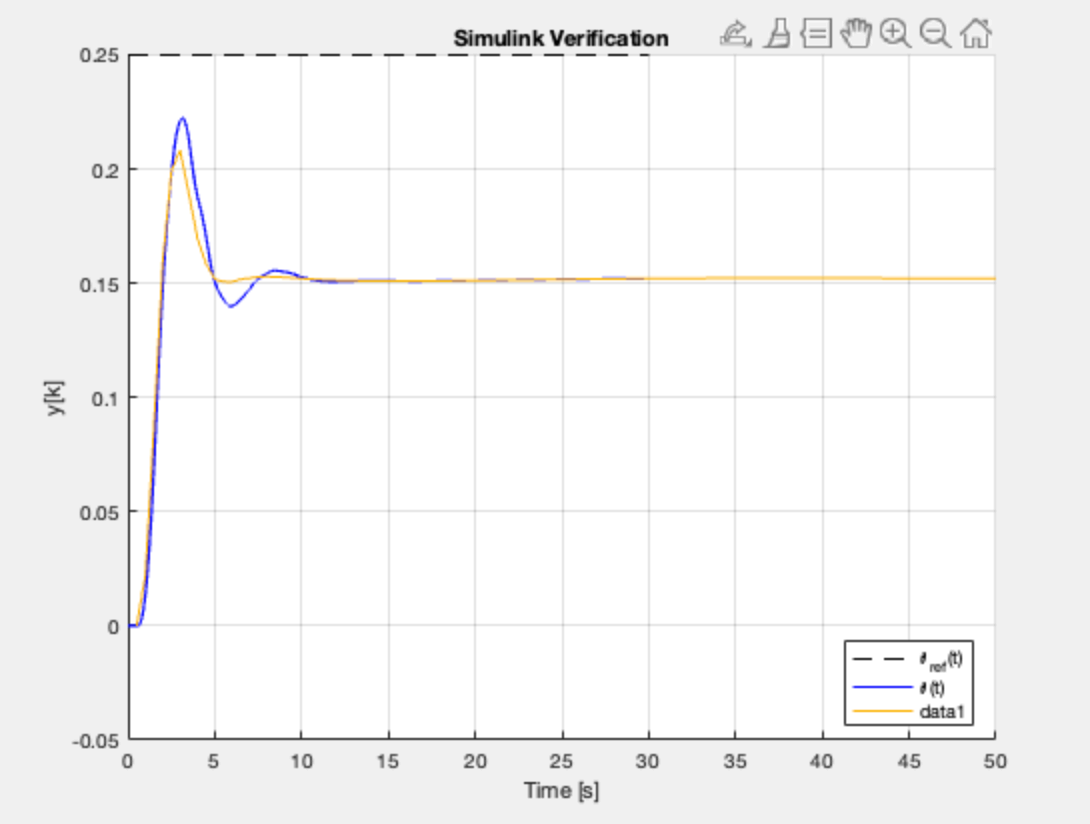
--- stepinfo results ---
Rise time: 0.8971 s
Settling time: 11.8056 s
Overshoot: 57.48 %
Peak value: 0.232584
Peak time: 3.1250 s (relative to step)
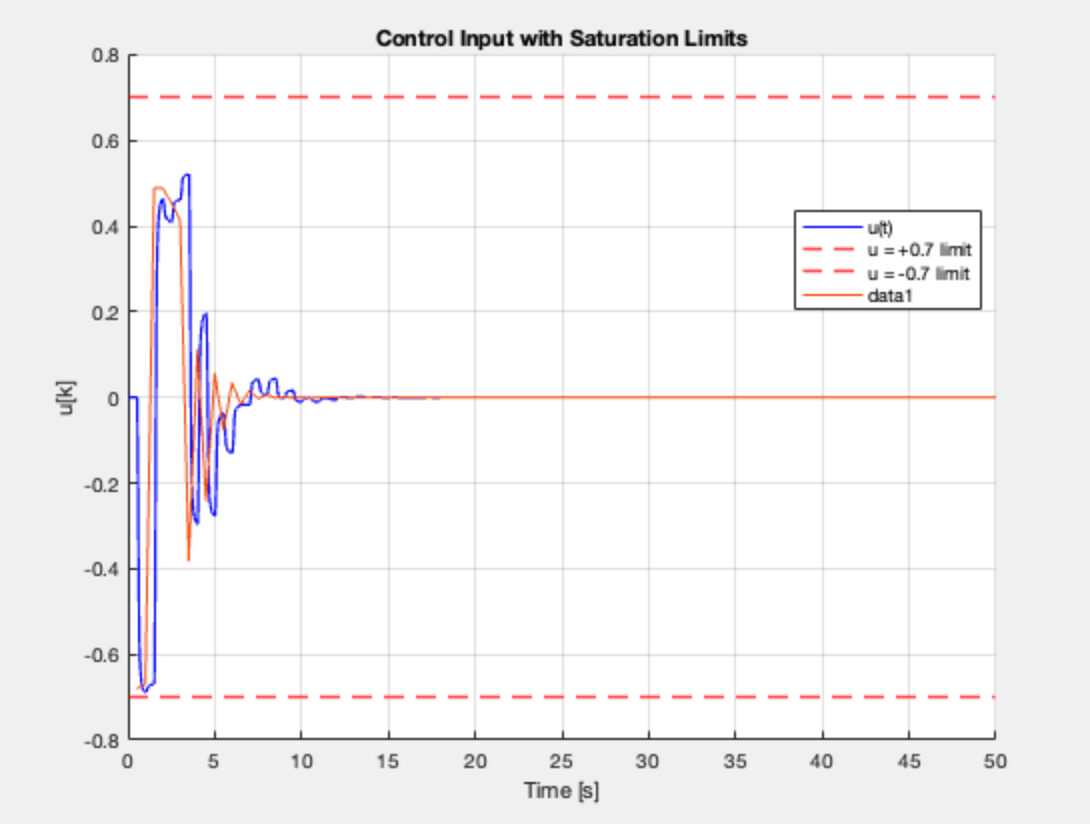
Max absolute control input (outer loop): 0.695026
-4.5825 (z-0.8247) (z+0.3899) (z^2 - 1.953z + 0.9543) (z^2 - 1.626z + 0.6638) (z^2 - 1.783z + 0.8003) (z^2 - 1.15z + 0.389)
(z^2 - 1.495z + 0.6256) (z^2 - 1.656z + 0.8219) (z^2 - 0.9419z + 0.381) (z^2 - 0.8224z + 0.9614)
-----------------------------------------------------------------------------------------------------------------------------------------
(z-0.9314) (z-0.9825) (z+0.01767) (z^2 - 1.602z + 0.6437) (z^2 - 1.755z + 0.7744) (z^2 - 1.15z + 0.389) (z^2 - 1.495z + 0.6255)
(z^2 - 1.617z + 0.783) (z^2 - 0.9419z + 0.381) (z^2 - 0.2782z + 0.2393) (z^2 - 1.126z + 0.7103)
- (z-1.014), (z-1.01)
>> realWPoles
realWPoles =
-0.646350111691813 -0.604109913948706 -0.615540744061376 0.851185476739658 -0.018723272511901 0.586722340486274
>> complexWPoles
complexWPoles =
Columns 1 through 3
-0.624097753060113 + 0.068335354545306i -0.624097753060113 - 0.068335354545306i 0.692620579127527 + 0.148286121140251i
Columns 4 through 6
0.692620579127527 - 0.148286121140251i 0.961762578049797 + 0.051667985413578i 0.961762578049797 - 0.051667985413578i
DEN = 1 2.32391687368473 1.71748265453187 0.306523365158218 0.0973818300340791 0.362940480525279 0.257592593409259 0.0699629092830807 0.00711049156419029
NUM = 0 -4.64278912827070 -10.7381050821537 -7.92937212570451 1.40955870324541 7.03784669890844 6.16352223893136 3.09905279584263 0.834999628934847
Sharp and smooth:
realWPoles
0.685582047559997 0.886941632813173 0.453856743319766 0.364022455055491 0.279995573174802 -0.364552450892025 0.459650611494159
complexWPoles
0.514939968632107 + 0.027572970951922i 0.514939968632107 - 0.027572970951922i 0.925954904074920 + 0.182689904503936i
0.925954904074920 - 0.182689904503936i
a = [0 -4.63017013855327 -0.541121146334854 0.488939879951233 -0.0796591716695027 2.23719691145781 1.24998242888679]
b = [1 0.118235828497067 -0.136941582187522 0.315644536116788 0.121331278152849 0.0309302634227834 0.0124369244695385]
--- stepinfo results ---
Rise time: 0.8833 s
Settling time: 8.8005 s
Overshoot: 53.18 %
Peak value: 0.229770
Peak time: 2.9250 s (relative to step)
Max absolute control input (outer loop): 0.705913
Small and smooth:
complexWPoles =
Columns 1 through 3
0.962238972941220 + 0.160853867173318i 0.962238972941220 - 0.160853867173318i 0.780908963708176 + 0.070665381901577i
Columns 4 through 6
0.780908963708176 - 0.070665381901577i -0.042557536614824 + 0.272270171620581i -0.042557536614824 - 0.272270171620581i
Columns 7 through 9
0.324214160145899 + 0.130726288120701i 0.324214160145899 - 0.130726288120701i 0.700897388099629 + 0.118810586847621i
Columns 10 through 12
0.700897388099629 - 0.118810586847621i -0.062161956006528 + 0.134999746092694i -0.062161956006528 - 0.134999746092694i
--- stepinfo results ---
Rise time: 1.0260 s
Settling time: 6.6956 s
Overshoot: 52.97 %
Peak value: 0.229452
Peak time: 3.4000 s (relative to step)
Max absolute control input (outer loop): 0.707785
a = 0 -4.66666666666561 6.55807404548921 -2.35152184569356 0.252001685598733 -0.140587327293981 0.448927352425222 -0.765490360821796 0.446220137102285
b = 1 -1.40250276213874 0.863588307968022 -0.275523174073078 0.0770775517460313 -0.0139612597512338 0.00533288818588099 0.00449790914409875 0.00366435670305026
Idek:
a = 0 -4.66666657112297 -5.71334467533668 0.527758031044943 3.63303268343666 2.04550237640322 1.18581671921380 0.782906356262210
b = 1 1.24801406332115 0.294056019090973 -0.0973944976857719 0.0817110767707347 0.0998188345074395 0.0260650996452369 0.00167589286850688
--- stepinfo results ---
Rise time: 1.0299 s
Settling time: 6.7485 s
Overshoot: 52.89 %
Peak value: 0.229329
Peak time: 3.3750 s (relative to step)
complexWPoles =
Columns 1 through 3
0.202682008587372 + 0.218692740238697i 0.202682008587372 - 0.218692740238697i 0.780842555624275 + 0.108551754063571i
Columns 4 through 6
0.780842555624275 - 0.108551754063571i -0.586695522067549 + 0.159084324199343i -0.586695522067549 - 0.159084324199343i
Columns 7 through 9
0.845862338391385 + 0.062984648555661i 0.845862338391385 - 0.062984648555661i 0.954396500118466 + 0.124909153605916i
Columns 10 through 12
0.954396500118466 - 0.124909153605916i -0.458046376414991 + 0.219221779306105i -0.458046376414991 - 0.219221779306105i
premature ejaculator:
a = 0 -4.66666666612145 -2.53001626261064 6.40237628863966 3.80858929784358 4.99671880250496 3.03559201542027 -10.7623268428793 -7.61777537027848 4.04655017448160 3.27205316579321
b = 1 0.542136240587238 -1.40969546526838 -0.829705229476998 0.378821781406049 0.159470060848469 -0.136988979351436 0.0251118109414924 0.166401276848355 0.114283362297186 0.0267442455030135
realWPoles = Columns 1 through 7
-0.355486999903681 -0.226089137169729 0.449032849681427 0.925162789669499 0.931069494432920 0.250460767690531 0.696148595728408
Columns 8 through 12
-0.418224746922088 -0.242728000905881 -0.533935764778620 0.958036544793448 -0.975587316687368
--- stepinfo results ---
Rise time: 0.8728 s
Settling time: 5.8349 s
Overshoot: 43.71 %
Peak value: 0.217129
Peak time: 2.9000 s (relative to step)
Max absolute control input (outer loop): 0.707785
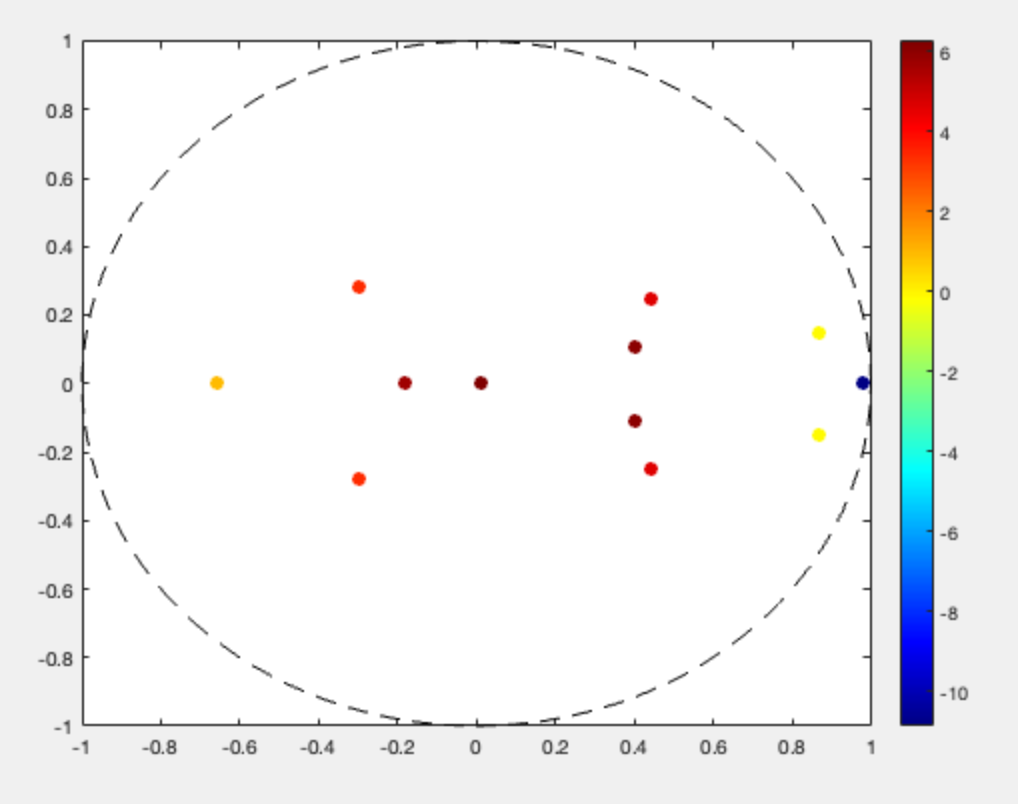
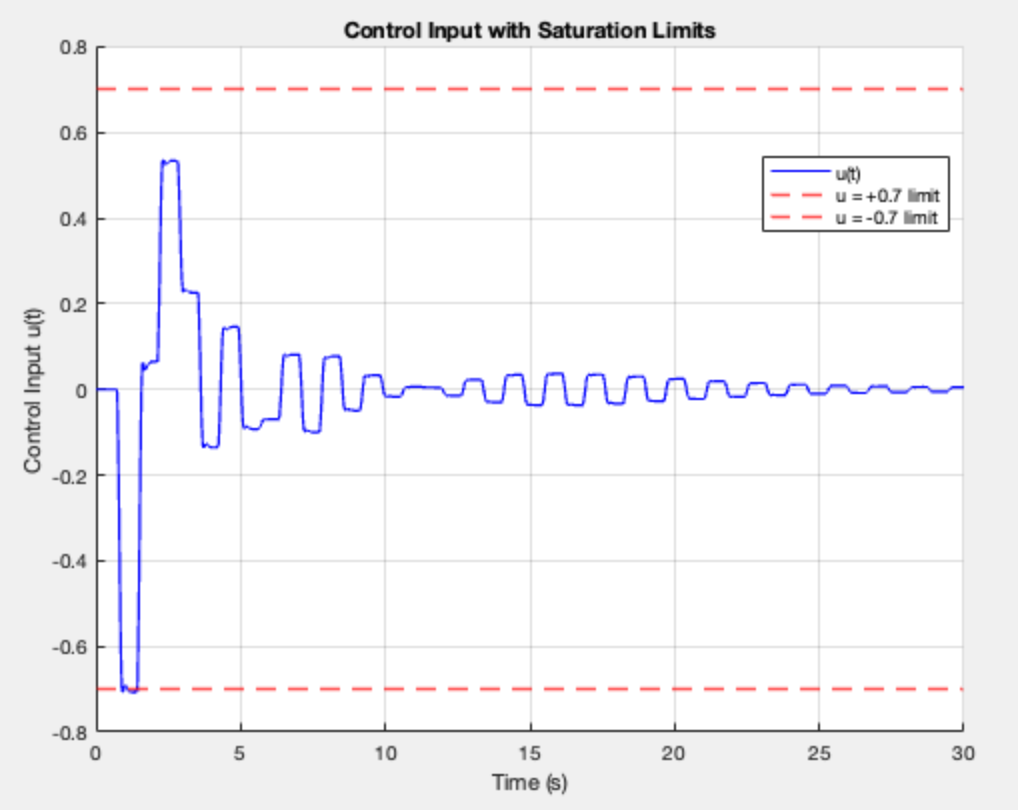
the final contender (resembles mr. smooth)
realWPoles =
0.980818186081497 -0.657805375303224 0.010427808533015 -0.179445368936604
complexWPoles =
Columns 1 through 3
0.867623228879922 + 0.147471886104563i 0.867623228879922 - 0.147471886104563i 0.401340715904988 + 0.109104534411110i
Columns 4 through 6
0.401340715904988 - 0.109104534411110i -0.297530306009091 + 0.280939647977631i -0.297530306009091 - 0.280939647977631i
Columns 7 through 8
0.444482233059823 + 0.248682541974162i 0.444482233059823 - 0.248682541974162i
a = 0 -3.96656697517943 4.89789814578035 0.929615063808888 -2.51285436812469 0.337754867023365 0.372214611369375 -0.0127068495018990 0.150495930656101 0.139177275889914 -0.357738753446430
b = 1 -0.988263601992751 -0.281171863000745 0.495060802177993 -0.0565874582745965 -0.0790715161955462 -0.0172734978227051 0.00504036690743160 -0.0109291444288046 -0.00821470872316814 -0.00287859617870927
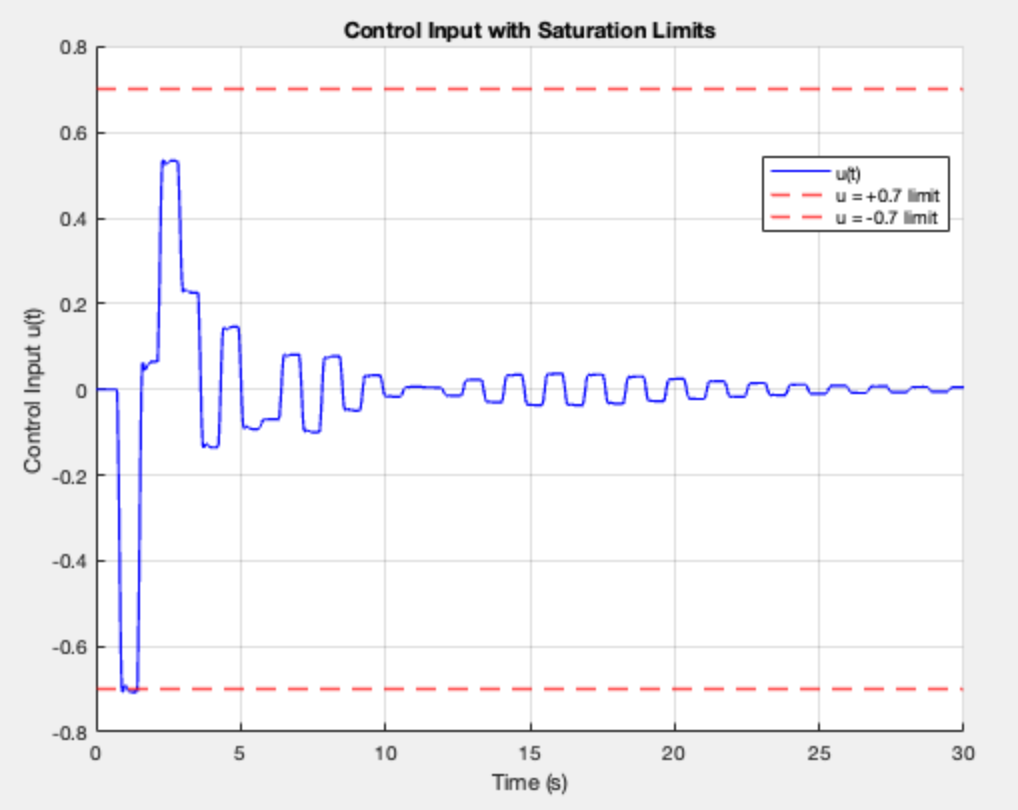
FAST and SHORT 0.7:
complexWPoles =
Columns 1 through 3
0.816203203434429 + 0.008671112907435i 0.816203203434429 - 0.008671112907435i -0.084606898110519 + 0.127490158804354i
Column 4
-0.084606898110519 - 0.127490158804354i
realWPoles =
Columns 1 through 7
-0.882091021381663 0.986832036535385 -0.614203034093135 -0.457400570606226 -0.774228116367801 0.891925124519857 0.311773117390400
Column 8
0.746255966896023
699 310