How do we linearize about , which is an equilibrium point?
We can approximate the nonlinear functions using a first-order Taylor expansion:
Then, we can write it as a vector
Then, we can write the Jacobians, which are the local slopes of the nonlinear system.
Re-visiting the pendulum from Nonlinear State Space Models, where we have :
This will then give us
- The first term is 0 because of the definition of an equilibrium point
So, if we define the deviation from the equilibrium point as , we can write
Similarly, for :
such that
Thus, for the entire system:
Thus, we can see that linearization about an equilibrium point leads to an LTI system.
For our pendulum case, consider fixing . This results in two equilibria:
Consider the linearization about :
Assume . Then, we would have
where has one stable eigenvalue with eigenvector and 1 unstable eigenvalue with eigenvector . The state space is shown below.

- Blue line is and red line is .
Definition: Stable equilibrium point
An equilibrium point is stable if all of the eigenvalues of the linearization at () are stable (in ).
Note that is an unstable equilibrium point because it has an unstable eigenvalue .
Consider the linearization about :
- The difference is is negative here.
Assume . Then, we would once again have:
where has 2 stable eigenvalues:
- Eigenvalue with eigenvector
- Eigenvalue with eigenvector
Thus, is a stable equilibrium point. The state space is shown below.
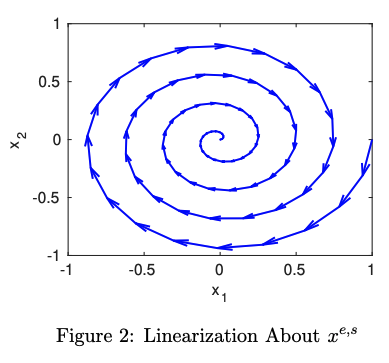
If we have , we will have 2 equilibria. The nonlinear state space is shown below:
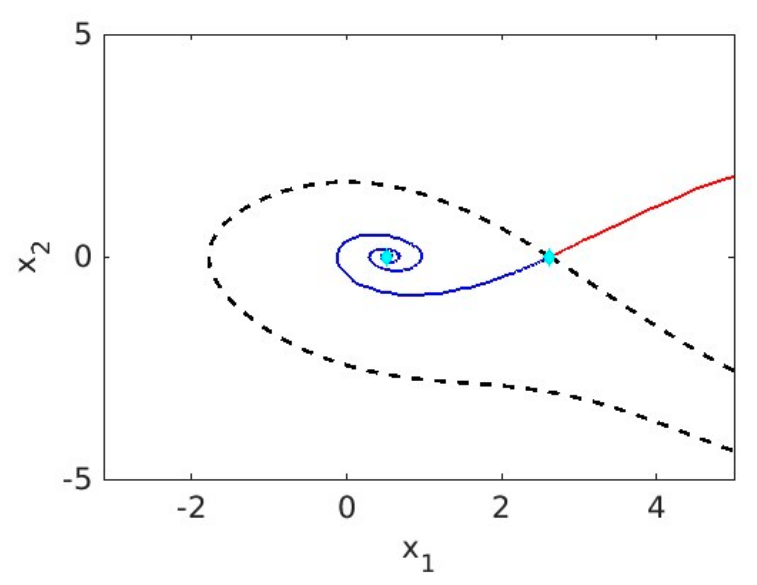
represents a desired operating point. The region inside the dashed line is the region of attraction of , which represents a safe operating region.
Definition: Region of Attraction
The region of attraction of is the set of initial conditions such that implies that .
The unstable trajectory from the above state space looks like this:

Linear approximation works well when you are inside the region of attraction of a stable equilibrium point and close to that equilibrium point. Problems can arise when disturbances push you outside of the region of attraction – can lead to undesired behavior. Also, linearization tells you nothing about global behavior.