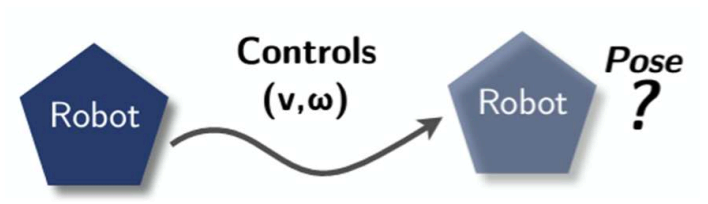
Forward kinematics: Given the control parameters (e.g., wheel velocities) and the time of movement , find the poses , reached by the robots.
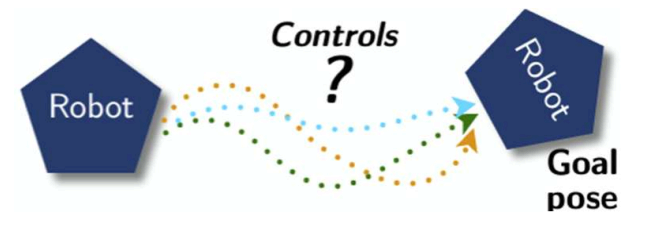
Inverse kinematics: Given the desired poses , find the control parameters to move the robot there at a given time .